This is an old revision of the document!
Aufbauanleitung und Inbetriebnahme
3D Modelle sind unter searchwing-3d-modelle verfügbar.
KnowHow
PX4 Parameter auslesen
- siehe PX4 WIki (https://docs.px4.io/en/advanced_config/parameters.html)
Flieger kalibrieren
- siehe PX4 Wiki (https://docs.px4.io/en/config/)
Klebstoffe
- Kleiberit 501.0 PUR: Vorsicht fließt wie Honig! Schäumt beim Trocknen, härte mit Luftfeuchtigkeit aus.
- Uhu Por: Aufbringen, 10min warten, maximal fest zusammendrücken (Kontaktkleber)!
- Uhu LowMelt Heißkleber: Kein Ein-/Ausschalter an der Pistole!
- Silikonkautschuk Elastosil N2010: Gelartig, am besten mit Spritze verteilen oder in einer Tüte gleichmäßig auf Bauteil aufbringen!
- Glasfaserklebeband 50mm/25mm: Nur mit Cutter schneiden, verklebt sonst die Schere! Hält gut auf EPO.
- 3M Foam Dampermat: Doppelseitig mit Klebefläche versehen
Schwerpunkt messen
- Schwerpunktwaage zusammenstecken
- Breite auf 200mm einstellen
- Anschläge auf 72mm einstellen (auf richtige Positionierung der Skalenstange (30mm bei Plastikaufnahme) achten!
- Gegengewichte passend verschieben, sodass die Aufliegearme austariert sind und sich frei bewegen lassen
- Flugzeug so auflegen, dass die Flügelvorderkante an den Anschlägen ist
- Flugzeugneigung überprüfen, ansonsten Flugzeug anpassen
Fuselage beams
The fuselage beams are the ones from the Mini Talon. Here is: How to glue the fuselage beams
Power Module
The power module provides the 5V DC/DC converters and the MOSFET switch. How to mount the power module in the fuselage
Wing Servo Connection
The servos in the left and right wing control the aileron. Here is: How to build the Wing servo connection
Inner Frame
The inner frame connects the Wingholme with the fuselage and it carries the PixRacer and the GPS Receiver. The frame is manufactured with 3D Print: How to build the inner frame
Raspberry Pis incl. connection to Powermodule and PixRacer
Two Raspberry Pis are mounted in the fuselage. Here is: How to mount the Pis and the Camera
RFD868+ Telemetry Radio connection
The RFD868+ long range telemetry is mounted on the right side of the fuselage. Therefore the modem is connected to the pixracer and power module just before glueing the left and right fuselage parts. Here is: How to mount the RFD868+ modem.
Connectors, Cables and Switches
Servo Cable
We use the Emax ES08MD servo. Servo cables come in two different coloring schemes.
- Futaba: black = ground, red = plus, white = signal
- JR/Graupner: brown = ground, red = plus, orange = signal
The minimum cable diameter is 0.08 mm2 (AWG30) and the maximum cable diameter is 0.5 mm2 (AWG18), which is limited by the servo standard connector. There are two different isolation materials around
- PVC: The default material and is used by cheaper cables
- Silicone: Higher flexibility but does not connect to glue like hot melt. They are often twisted.
The cable comes in different qualities regarding the flexibility which translates to a different number of copper wires in the cable.
- Flexible, e.g. 0.14mm2 LiY Cable comes with 18 x 0.1mm wires
- Highly flexible, e.g. 0.14mm2 LiFY comes with 72 x 0.05 wires for the same diameter.
For our application the highly flexible versions should be used because they are designed for vibration environments.
Basic servo cable could be: Muldental 3 x 0.14mm2 (AWG26), 72x0.05mm, PVC cable, JR color, 5m for 6.10€.
Servo standard connector
The standard servo connectors are based on FCI Amphenol Mini PV Basics+. There are different connectors for the AWG18-20, AWG22-26 and the AWG28-30 range. See the product description. Crimping seems prone to errors, so precrimped cables might be the way to go. We do not have a crimp tool for these in the lab.
- Connector cable 0.14mm2, 30cm for 2.80€
- Muldental Premium extensions: 0.25mm2 (10cm, 4.40€, 25cm)
I think in the lab we have a clone product from Harwin.
- Harwin M20 Connector, AWG22-30, i.e. max 0.4mm2 cable
including the Harwin M20 crimp tool.
The housings and connectors of different manufacturers seem not to fit, i.e. the Harwin M20 connector does not fit in the FCI housing.
Servo cable watersealed connector M5
The wings must be removable and the fuselage must be watersealed. Therefore the servos in the wings are connected with a
- Tensility M5 3-pin plug, IP67, AWG26 (0.14mm2), 2.94€
- Tensility M5 3-pin socket, IP67, AWG26 (0.14mm2), 3.04€
Alternative from NorComp:
- NorComp M5 3-pin connector, IP67, Cable AWG26 - AWG28
- 850-003-103RLU4 - 3 position, male connector, gold plated, 5.70€ each
- 850-003-203RLU4 - 3 position, female connector, gold plated, 6.00€
Battery cable
Also for the battery a highly flexible cable should be used.
- Muldental 2.5mm2, 651x0.07mm, Silicon cable 6.90€ for 4m (1.70€/m)
Power cable for Telemetry and Pi
The RFD868 telemetry modem and the Raspberry Pi are powered from an extra power supply. Both have the 2.54 mm standard connectors. Therefore this can be connected with the servo cable connectors. Suitable might be:
JST-GH Connector and Cable for PixRacer
The Pixracer, the mRobotics power module and the mRobotics GPS have JST-GH connectors. The crimping again requires special tooling. But there are precrimped cables.
- AWG28 (0.08mm2) 30cm JST-GH cable at 0.40€ per cable.
- JST-GH 6pin connector for UART and power
- JST-GH 5pin connector for RC in (PPM/SBUS)
- JST-GH 4pin connector for FrySky port
Switch for Battery (Watersealed)
It should be possible to switch off the battery from the outside. This requires a watersealed solution.
- Marquardt 1932.3112 IP65 on/off switch 2.99€, 13g
A smaller alternative with 10A max current is
The (initial) on-resistance of 100mOhm of the Marquard switch will result in 10W Power consumption at 10A. A better approach is to use the switch to control the MOSFET. A schematic for the power switch including the MOSFET is here:
Battery charging plug
To charge the battery from outside a watersealed plug is required
- Switchcraft RASPC10S charging plug, IP68, 4.74€, 10A
- Switchcraft sealing cap, 1.20€
- Switchcraft Charge Cable 2m, 10A, 18€
Montage Rumpf und Halterungen
ESC - Motor mit Schott
- Kabel ESC-Motor abmaßen und abschneiden (Verlängerung durch den Schott)
- Schott (XPS) Kabeldurchführung ESC-Motor im unteren Drittel einzeln einkleben (Kleiberit 501.0 PUR)
- Stecker MT60 (female innnen, male außen) auf Kabel ESC-Motor verlöten
- Stecker MT60 (male) auf ESC verlöten
- Stecker MT60 (female) auf Motor verlöten
- Schrumpflauch (12mm auf 8mm) auf ESC aufschieben
- Schrumpflauch (12mm auf 8mm) auf Motor aufschieben
- ESC, Kabel ESC-Motor und Motor anstecken
- Schrumpfläuche schrumpfen

Servos wasserdicht
- Neutralstellung Horn markieren
- Horn abschrauben (PH0)
- O-Ring 3,50mmx1,0mm auf Welle aufbringen
- Horn anschrauben (M2,5x2mm, PH0, nicht metrisch) unter Beachtung der Neutralstellung
- Vergießen (Silikonkautschuk Elastosil N2010) (besonders auf Gehäusenähte und Kabeleinlässe achten!)
- Wasserdichten Stecker JWPF-VSLE-S verkrimpen
V-Tail anbringen
- Ruderhorn einkleben (Uhu Por)
- Wasserdichte Servos in V-Tail einkleben (Uhu Por)
- Servokabel in Kanal verlegen
- V-Tail mit geklebten Servos einkleben (Uhu Por) (auf Kabeldurchführung in den Rumpf achten!)
Servokabel durch Schott
- Länge der Servokabel beachten!
- 3mm breite und 1mm hohe Löcher im oberen Drittel in Schott ausstanzen/bohren
- Servokabel einzeln verkleben (Kleiberit 501.0 PUR)
Rahmen in Rumpf
- Kohlefaserrohre durch linke Rumpfhälfte führen
- Linke Rahmenseite auffädeln und einkleben (Uhu Por)
- Rechte Rahmenseite auffädeln
- Kohlefaserrohre durch rechte Rumpfhälfte führen
- Rechte Rahmenseite einkleben (Uhu Por)
Deckelaufnahme in Rumpf
- Holzstege mit Muttern zum Rumpfboden montieren (vorne lang, hinten kurz) (auf Lochübereinstimmung mit EPO achten!)
Schott fixieren
- Schott mit verklebten Kabeln in die linke Rumpfhälfte einkleben (Kleiberit 501.0 PUR)
Motormount fixieren
- Einpressmuttern in die Motorhalterung einpressen (Muttern warmmachen und mit Zange einpressen)
- Motormount in die linke Rumpfhälfte einkleben (Uhu Por)
Rumpf zusammenkleben
- Einpressmuttern in CrossSupport einpressen (Muttern warmmachen und mit Zange einpressen)
- CrossSupport des Rahmen in die linke Rumpfhälfte einstecken
- Grundplatte mit Gummidämpfer auf Rahmen schrauben (M3x10mm, Inbus3, metrisch), Reihenfolge Einpressmutter - CrossSupport - Gummidämpfer - Grundplatte - M3x10mm Schraube
- linke Rumpfhälfte, rechte Rumpfhälfte, Nasenverstärkung, Rahmen, Schott, UV-Flter und Motormount zusammenkleben (Uhu Por)
Rumpf abdichten
- WICHTIG: Der Objektivauschnitt für den Pi wird seperat abgedichtet!
- Lochstopfen aus Depron ausschneiden
- Rumpfnähte und Löcher reinigen (fusel- und fettfrei)
- Lochstopfen in die entsprechenden Rumpflöcher kleben (Kleiberit 501.0 PUR)
- Glasfasermatte ??g/mm² in 3x15cm Streifen schneiden
- Rumpf entlang der Nahtstelle mit Glasfaser laminieren, dabei von hinten nach vorne überlappend vorgehen
Flügel zusammenbauen
- Ruderhorn einkleben
- Kabelkanalabdeckung abnehmen
- Großes Kohlefaseraufnahmerohr und Fixierung verkleben (Uhu Por)
- Wasserdichte Servos einkleben (Uhu Por)
- Servokabel in Kanal verlegen
- Kabelkanalabdeckung bei Bedarf an wasserdichte Servokabelstecker (JWPF-VSLE-S) anpassen
- Kabelkanalabdeckung verkleben (Uhu Por)
- Servo und Kabelkanal mit Klebeband (Glasfaserklebeband 25mm) abkleben und plan an Tragfläche anpassen
- Ruder mit Klebeband (Glasfaserklebeband 25mm) an der Flügeloberseite verstärken (auch Anpassung an Kante ohne Einschnitte achten!)
Flügelservokabeldurchführung wasserdicht
- Flügelservokabelverlängerung abmaßen
- Flügelservokabelverlängerung mit Steckern (JWPF-VSLE-S außen, 3pol Buchsenleiste innen) verkrimpen
- Flügelservokabelverlängerung sollte ca 7cm aus dem Rumpf herausragen
- Flügelservokabelverlängerung durch Rumpfhälften mittig vergießen (Uhu LowMelt Heißkleber)
Kohlefaserrohrdurchführung wasserdicht
- Flügel aufstecken
- Platzierung der Kohlefaserrohre markieren und bei Bedarf Kohlefaserrohre fixieren
- Flügel abziehen
- Von außen Kohlefaserrohrdurchführung vergießen (Silikonkautschuk Elastosil N2010) (auf möglichst plane Fläche bei der Flügelrumpfkontaktfläche achten!)
PiZero-Halterung verkleben
- UV-Linse an Halterung ankleben (Uhu LowMelt Heißkleber)
- OPTIONAL: Objektivloch entsprechend dem Linsendurchmesser vergrößern
- PiZero-Halterung einkleben (Uhu Por) (auf Ausrichtung vorne/hinten achten!)
ESC-Halterung verkleben
- ESC mit Kabelbinder auf Halterung befestigen
Für Modelle mit schon eingebauter PiZero-Halterung
- ESC auf Halterung mit Kabelbinder befestigen
- ESC-Halterung ganz hinten einkleben (nicht vorne, die SD-Karte des Pi muss entfernbar bleiben!)








Kufe verkleben
- Kufe einkleben (Uhu Por)
- Mit Glasfaser laminieren und verstärken
Deckel anpassen
- 10Ah Akku Öffnung
- An der hinteren Kohlefaserrohrführung mit Klebeband verstärken (Glasfaserklebeband 50mm)
- Aus dem Rumpf seitlich zwei 10mm breite Stücke von vorne bis zur großen Kohlefaserrohrdurchführung vorsichtig herrausschneiden
- Diese herrausgeschnittenen Teile nun seitlich am Deckel (vorne) passend ankleben (Uhu Por)
- RFD900 Telemetrie
- 8mm Loch mittig und 30mm von vorne in den Deckel bohren
- RFD900 Modul auf Halterung schrauben
- RFD900 Halterung passend aufkleben (Uhu Por)
- RC FrSky
- RC Modul auf Halterung schrauben
- RC Halterung mittig nach der hinteren Aussparung aufkleben (Uhu Por)
- Diagonal zum Ende des Deckels hin vorsichtig zwei Einschnitte für die Antennen anbringen
- Antenne in Einschnitte einlegen und fixieren (Glasfaserklebeband 25mm)
Akkuhalterung verkleben
- Spannklettband in die Aussparung einkleben (Sekundenkleber flüssig)
- WICHTIG: Vor dem Verkleben der Akkuhalterung Position mit der Schwerpunktwaage überprüfen
- Akkuhalterung ca5mm mittig von der Rahmenvorderseite Richtung Rumpfspitze gemessen verkleben (Uhu Por) (auf Ausrichtung vorne/hinten (vorne breiten Wand, hinten Spannklettband) achten!)
Kabelbaum
Maße (alt)
| Src | Dst | Src - Stecker | Dst - Stecker | Länge [mm] | Kabelart | Querschnitt [mm²] | Anmerkungen |
|---|---|---|---|---|---|---|---|
| Pixracer (GPS) | GPS | JWSTAG | JWSTAG | 100 | 6-polig | vorkonfektioniert | |
| Pixracer (Switch) | Switch/Alarm | JWSTAG | verlötet | 50 | 3/2-polig | vorkonfektioniert | |
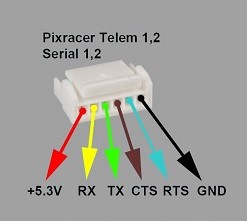
| Pixracer (Telem1) | RFD900 | JWSTAG | 8-pol Stecker | 300 | 5-polig | vorgekrimpte Kabel, 1 von 2 Kabelteilen |
|
| Pixracer (sBus, FrSky) | RC Reciever | JWSTAG | JWSTAG | 150 | 3/2-polig zu 4-polig | zwischendrin verlötet | |
| Pixracer | PiZero | JWSTAG | 10-pol Stecker | 300 | 5-polig | 1 von 2 Kabelteilen | |
| PowerModule | BEC | verlötet | verlötet | 40/60 | 2-polig | 0,5 | |
| BEC | WAGO V+/Gnd | verlötet | Klemme 221 | 40/60 | 2-polig | 0,5 | |
| WAGO V+/Gnd | RFD900 | Klemme 221 | 2-pol Stecker | 400/450 | 2-polig | 0,5 | 2 von 2 Kabelteilen |
| WAGO V+/Gnd | PiZero | Klemme 221 | 10-pol Stecker | 350/250 | 2-polig | 0,5 | 2 von 2 Kabelteilen |
| Pixracer (Servorail 4/5) | Servoverlängerung Wing L/R | 3-pol Stecker | 3-pol Stecker | 200 (?) | 3-polig | ||
| Pixracer (Servorail 2/3) | Servoverlängerung V-Tail L/R | 3-pol Stecker | 3-pol Stecker | 200 (?) | 3-polig | ||
| ESC | Motor | MT60 | MT60 | 350 (?) | 3×1-polig | 1 | Schottverlängerung |
PiZero W
 TODO
TODO
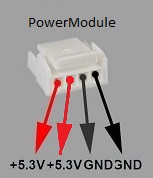
 Stromversorgung zu PowerModule
Stromversorgung zu PowerModule
- 4 mal 6“ vorgekrimpt auf JST
- JST 4-polig auf Buchsenleiste 8-polig
- GND, GND, 5V, 5V (je GND und 5V für ein PiZero W)
Zur Kennzeichnung kann z.B. 5-10mm Schrumpfschlauch verwendet werden.
Montage der Mechanik und Elektronik
Pixracer montieren
- Grundplatte abschrauben (Inbus3) (auf Gummidämpfer achten!)
- Etikett auf Grundplatte aufbringen, auf Ausrichtung vorne/hinten achten
- Pixracer auf Grundplatte aufbringen (3M Foam Dampermat) (auf Abstand zu Montagelöchern der Grundplatte achten!) (auf Ausrichtung vorne/hinten achten! Servorail hinten)
GPS montieren
- Distanzhalter (M2,5x20mm sechskant) auf Grundplatte mit Kontermutter anbringen
- GPS-Mount auf Distanzhalter schrauben (M2,5x6mm, PH0, metrisch)
- GPS auf GPS-Mount schrauben (M2,5x4mm, PH1, nicht metrisch) (auf Ausrichtung achten! Pfeil vorne)
Motor montieren
- Motorkreuz an Motor schrauben (M3x6mm, PZ1, nicht metrisch mit Senkkopf)
- ALTERNATIV: Motorkabel an Motor-Schott- ESC-Kabel stecken (Motor testen!)
- Motorkreuz an Motormount schrauben (M3x10mm, PZ1, nicht metrisch)
Flügel montieren
- Flügel vorsichtig auf Kohlefaserrohre aufstecken
- Servokabel an Servokabelverlängerung anstecken
- Flügel vorsichtig komplett an der Rumpf schieben (falls die Kohlefaserrohre nicht fixiert sind, beide Flügel simultan aufstecken) (auf plane Zwischenfläche und Servokabelführung achten!)
- Am großen Kohlefaserrohr die Fixierung an der unteren Flügelfläche (5cm vom Rumpf Richtung Flügelspitze entfernt) anziehen (Inbus M2,5)
Akku montieren
- XT60 Stecker und Kabel (Richtung Akku) des PowerModules unter dem Rahmen fixieren
- Akku in Akkuhalterung einschieben mit der Beschriftung oben bzw. Stromkabel mti XT60 Stecker an der rechten Rumpfseite
- Akku mit PowerModule verbinden (XT60 Steckverbindung)
- Akku-PowerModule-Kabel unter dem Rahmen am Rumpfboden fixieren
Einstellen der Mechanik
Servo mit Ruderstange
- Servohorn abschrauben
- Servo flach hinlegen (eingebaut wäre die Getriebewelle vom Flugzeugrumpf weg)
- Mittelstellung mit Servotester einstellen
- Servohorn vertikal montieren
- Servo testhalber in den Platz einlegen
- Ruderstange durch das mittlere (Flügel) bzw äußere (V-Tail) Loch im Servohorn führen (das gebogene Ende)
- Ruderhornaufnahme im mittleren Loch im Ruderhorn mit Kontermuttern montieren
- Ruderstange durch die Ruderhornaufnahme führen (das gerade Ende), sodass sich die Ruderstange bei Drehung des Servos frei bewegen kann
- Maximalausschläge mit Servotester einstellen und jeweils prüfen
- Servo dreht gleichmäßig
- Servo brummt nicht
- Servohorn kommt nicht an das EPO
- Ruderstange berührt nicht das EPO
- Ruderstang ist freibeweglich durch das Ruderhorn
- Ruderstange biegt sich nicht durch
Einstellen der Elektronik
Ansteuerung Motor
- WICHTIG: Der Drehsinn! Wenn man von hinten aufs Flugzeug guckt, muss der Propeller sich im Uhrzeigersinn drehen! Sollte der Propeller in die falsche Richtung drehen, so mögen das rote und gelbe Kabel getauscht werden. (Am besten mit einem Stück Klebeband und nicht mit dem Propeller testen, Schnittgefahr!)
- 1 auf Schwarz, 2 auf Rot und 3 auf Gelb
Inbetriebnahme des Autopiloten (Pixracers)
- QGroundControl herunterladen/starten QGroundControl
- pixracer Autopilot mit QGroundControl verbinden
- Autopilot abstecken und erneut anstecken
- Der Autopilot wird automatisch erkannt
- Wenn der Autopilot erkannt wurde, die gewünschte Firmware (Ardupilot neuste Version) auf den Autopiloten aufspielen
- Airframe auswählen (V-Tail → Mini Talon)
- Airspeed sensor deaktivieren ? Parameter/Circuit Breaker/cbrk_airspd_chk auf maximalen Wert setzen: 162128
- Sensoren kalibrieren (Anleitung des Programms folgen)
- RC Empfänger verbinden (Port:RC)
- RFD900 (Telemetrie) verbinden (Port:TL1)
- Netzteil verbinden (Port:PWR) → von Energieversorgung der Motorsteuerung kommt der Strom
- Flight Mode Setup: Einen Channel auswählen der mit einem Schalter verbunden ist und diesem die drei Flugmodi (STABILIZED,ALTTITUDE,MISSION) zuweisen.
- Flight Mode Setup: Einen anderen Channel auswählen der mit einem Schalter verbunden ist und diesem in einer Stellung den Flugmodus RETURN zuweisen.
Ansteuerung Servorail
Airframe “Plane V-Tail”, Name “X-UAV Mini Talon” in der PX4 Dokumentation (http://docs.px4.io/en/airframes/airframe_reference.html#plane-v-tail).
Bei Ardupilot werden die entsprechenden Servofunktionen als Parameter eingestellt (http://ardupilot.org/plane/docs/servo-functions.html).
- Pin: Querruder rechts (aileron right)
- Pin: Querruder links (aileron left)
- Pin: V-Leitwerk rechts (v-tail right)
- Pin: V-Leitwerk links (v-tail left)
- Pin: ESC
Kontrolle der Servokonfiguration
- Querruder (Aileron)
- Querruder nach rechts → rechte Klappe nach oben. linke Klappe nach unten
- Querruder nach links → rechte Klappe nach unten, linke Klappe nach oben
- V-Leitwerk (V-Tail)
- Höhenruder gezogen → beide Klappen gehen gleichsinnig nach oben
- Höhenruder gedrückt → beide Klappen gehen gleichsinnig nach unten1) </sup>
Waterproofing the servos (alternativ way)
One interesting article on Instructables on this topic:https://www.instructables.com/id/Waterproof-your-servo-motors/
1. Make the housing waterproof
* I used “Curil”, a standard sealing compound. * Open the servo and put the sealant an all touching surfaces * also put sealant to the cable, where it leads through the housing

2. Insert a O-Ring under the horn
* remove the horn * add a 1mm thick o-ring * add some lubrication. I used “CRC Multilube” - attention - lubrication has to be compatible with the rubber of the sealant. Don't use silicon rings with silicon lubricant. * screw the horn back on

http://wiki.rc-network.de/index.php/V-Leitwerk