MiniTalon - the plane
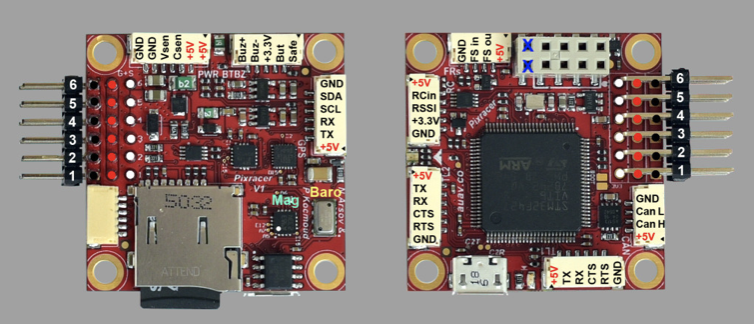
Pixracer
The Pixracer is already equipped with most of the needed sensors for our autonomous missions.

mRobotics GPS
The extra precision needed for the missions is provided by the special drone GPS module.
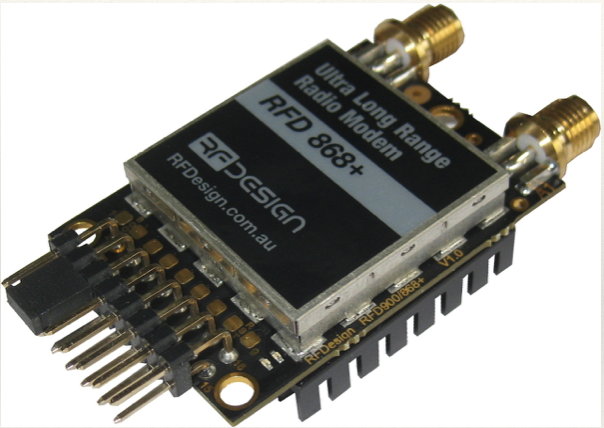
Telemetry for extended range
For the communication with the plane during the mission a telemetry link with extended range is needed: the Australian company rfDesign offers excellent modules for this.
http://store.rfdesign.com.au/rfd-900x-modem/
We could measure distances over 80km.
Over this link the drone can not only receive missions but als return the position of possible people in distress - including pictures.
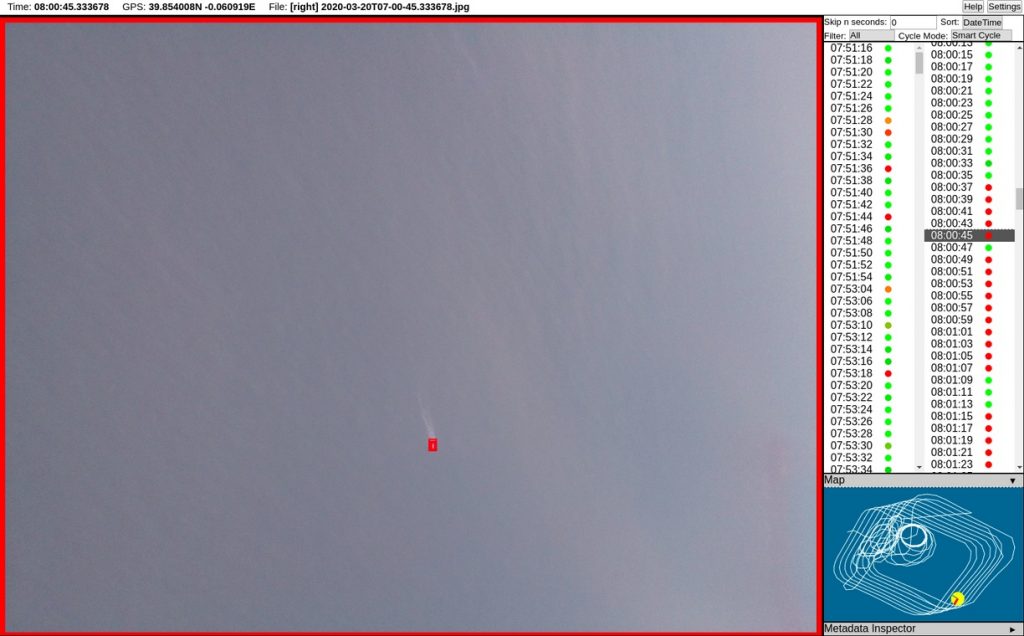
Camera and image processing
The pictures taken by the attached two 8 MP cameras are stored on the Raspberry for later manual or automatic evaluation.