Der Thermik-Star Spezial von CHK

Der Thermik-Star Spezial ist ein sehr schöner Thermik-Segler (Softliner) von der kleinen, aber feinen Firma CHK in Regensburg. Er war praktisch das Einsteigermodell der Firma, auch für Anfänger geeignet, aber ein vollwertiger Floater. Es gab ihn mit oder ohne Elektroantrieb, mit V- oder T-Leitwerk und mit großen Flügeln (2,57 m Spannweite) oder etwas kleineren (2,30 m, ohne Tiplets). Auch Bremsklappen gab es auf Wunsch.
Diese Aussagen sind alle in die Vergangenheitsform gebracht, weil der Thermik-Star Spezial schon lange nicht mehr lieferbar ist. Zuletzt gab es von CHK nur noch wenige, allerdings sehr schöne Vollkunststoffmodelle (siehe Seiten von 2011 im Web Archive). Mittlerweile ist der Betrieb ganz eingestellt (siehe CHK-Abschiedsseite von 2018).
Konfiguration

Mein Modell (von 2002) hat einen 'mittelstarken' Elektroantrieb, V-Leitwerk, große Flügel mit Querrudern, aber keine Bremsklappen. Das Flugverhalten ist sehr angenehm und gutmütig, die Thermikleistung sehr gut. Das Gewicht des Antriebs scheint dem Modell gut zu bekommen, denn es hat damit eine gute 'Durchsetzungsfähigkeit'.

Warum diese Konfiguration? Für mich kommt nur ein Elektrosegler in Frage, weil ich allein und unabhängig fliegen will. Für Hochstart hätte ich nicht den nötigen Platz und er würde das Modell stark belasten. Mit dem Antrieb kann man das Modell wieder auf Höhe bringen, auch ohne Landung und neuen Hochstart, wenn es schon zu tief ist für Thermikanschluß. Für solche Steigflüge ist der Antrieb normalerweise auch ausgelegt. Man kann aber auch einfach thermiklose Zeiten im 'Schleichflug' überbrücken, wofür der Antrieb meist zu stark ist. Motor und Steller müssen dann wenigstens teillastfest sein, was nicht selbstverständlich ist.

Selbst wenn man den Antrieb zum Thermikfliegen nicht brauchen würde, er hat weitere Vorteile: Der Landeanflug muß nicht genau passen (was auch Glücksache ist), denn man kann tief anfliegen und das Modell mit geringer Fahrt zum Aufsetzpunkt schleppen. Der Antrieb kann auch als Luftbremse benutzt werden, wenn der Propeller vom Fahrtwind angetrieben wird. Das wirkt besser als hochgestellte Querruder, die beim Thermik-Star natürlich auch verwendet werden. Weil der Antrieb recht stark ist, bremst er auch stark und ist gut für den Abstieg aus großer Höhe. Zur Gleitwinkelsteuerung im Landeanflug ist er weniger zu gebrauchen, weil es hohe Geschwindigkeit für gute Bremswirkung braucht. Aber er könnte sogar als Sturzflugbremse taugen, womit man das Modell aus starker Thermik retten könnte. Das probiere ich aber nur aus, wenn es nicht anders geht, und bisher ging es immer noch anders.

Die Querruder bringen jedenfalls weniger Bremswirkung. Außerdem haben sie als Bremsklappen weniger Querruderwirkung. Wohl deshalb werden auch die zusätzlichen, 'richtigen' Störklappen angeboten. Die habe ich aber nicht genommen, weil sie (a) auch nicht für Sturzflug reichen, (b) wegen der Motorbremse überflüssig sind und (c) ein Senderkanal frei bleibt. Mein Sender Multiplex Cockpit MM hat 7 Kanäle, der Empfänger Multiplex Micro-IPD ebenfalls. Die Kanäle 1 und 5 sind die Querruder, 2 Höhenruder und 3 Seitenruder (beide auf das V-Leitwerk gemischt), 4 Motorsteller. Weil der Antrieb auch Bremse ist, wird der Kanal 4 natürlich auf einen Knüppel am Sender gelegt, nicht auf einen Schieber. Der Piezo-Kreisel für die Querruder, Fuzzy Pro von ACT, braucht nun Kanal 6 zum Einstellen der Wirkung im Fluge. Dieser Kanal liegt im Sender an einem Drehknopf, was ich sehr passend finde. Jetzt bleibt nur noch Kanal 7 für das Variometer Picolario talk von Renschler. Sinnigerweise liegt der Kanal an einem Dreipunktschalter, denn man kann das Variometer damit ausschalten, einschalten und auf regelmäßige Höhenansage schalten. Die Zwänge der Belegung von 7 Kanälen mit so vielen Servos und Geräten haben eigentlich den Ausschlag für die Wahl der Konfiguration gegeben. Ob die Bremswirkung des Antriebs wirklich so sein würde wie nötig, konnte ich noch nicht wissen. Das war Spekulation, es ging einfach nicht anders.

Ursprünglich gab es das Modell wohl nur mit der kleinen Spannweite von 2,3 m. Später wurden die 'Tiplets' angefügt, um sowohl Leistung als auch Verhalten beim Thermikkurbeln zu verbessern. Da ich ein ausgesprochenes Thermikmodell wünschte, war der große Flügel mit 2,57 m Spannweite der richtige. Damit ist das Modell zwar etwas träge in den Querrudern, steigt aber gut beim Kreisen und liegt recht stabil. Mit der kleinen Spannweite wäre es wohl wendiger und schneller, aber das braucht man eher am Hang. Das Profil SD7037 hat einen hohen maximalen Auftriebsbeiwert und keinerlei 'Mucken'. Übrigens kann ich keine Schränkung am Flügel erkennen, weder geometrisch noch aerodynamisch. Profil und Einstellwinkel scheinen mir über die ganze Spannweite gleich zu sein.

Flügel- und Leitwerksbefestigung waren der Hauptgrund, warum ich ein Modell von CHK gekauft habe. Beides ist nämlich sehr gut und sauber gemacht und wirklich fertig. Im Flügel sind gleich hinter dem Holm zwei Bohrungen, in die gedrehte Aluminiumrohre mit einem 'Kragen' eingesetzt werden. Darin liegen dann die Schrauben aus Nylon mit ihrem Senkkopf. Der Rumpf hat eine sauber geformte Auflage für den Flügel und zwei 'Muttern' aus Holz, die innen eingeharzt sind. Das ist leicht und präzise sowie ausreichend fest. Der Schwerpunkt des Modells soll genau mittig in den Schrauben liegen. Die Leitwerkshälften haben je zwei Stahlstifte, die in Löcher im Rumpfheck gesteckt werden. Das sitzt sehr genau, aber man soll die Leitwerke trotzdem mit Klebefilm sichern. Diese Befestigungen kann der Hersteller mit einfachen Vorrichtungen sehr genau herstellen, während ich es 'freihändig' nie so gut hinbekommen würde.

Das V-Leitwerk habe ich eigentlich nur gewählt, weil ich einmal selbst eines ausprobieren wollte. Es heißt ja (auch bei 'richtigen' Flugzeugen), daß Kreuzleitwerkler sauber geradeaus laufen, während V-Leitwerkler 'schwänzeln'. Aber in turbulenter Luft ist das gleichgültig, und V-Leitwerke sind einfacher und leichter gebaut. Der Gewichtsvorteil an sich ist unerheblich, aber das geringere Trägheitsmoment des Rumpfes verbessert die Flugeigenschaften geringfügig. Das Leitwerk hat kein Profil, sondern ist ein ebenes Fachwerk mit abgerundeter Nase. Die Ruder werden etwas nach unten angestellt, so daß so etwas wie ein gewölbtes Profil entsteht.
Flügel
Der Flügel besteht aus dem geraden Mittelstück und zwei Außenteilen mit den Querrudern und Tiplets. Zunächst habe ich, wie empfohlen, alle Kanten der Folienbespannung mit weichem Klebefilm gesichert. Man sieht das auf dem folgenden Bild an der Querruderkante. Dieser überraschend langwierigen Arbeit folgte der Einbau der Servos mit Kabeln.

Die Querruder sind mit Folienscharnier angeschlagen. Nach oben können sie praktisch unbegrenzt ausschlagen, was für Bremsklappen (Spoileron) genutzt wird (25mm Ausschlag). Als Querruder sollen die Ruder differenziert, also nach oben mehr und nach unten weniger ausschlagen. Nach oben sollen es 12mm sein, nach unten nur 3 bis 5mm. Mehr geht auch nicht, weil die Ruder dann mechanisch am Anschlag sind.
Beigelegt waren flache Ruderhörner, welche in einem Schlitz im Ruder eingeklebt werden sollten. Diese Anbringung gefiel mir nicht und mir lag auch der Anlenkungspunkt zu weit hinten. Deshalb kaufte ich Ruderhörner, die so weit nach vorne ragen, daß der Anlenkungspunkt unter der Scharnierachse liegt. Außerdem haben sie eine kreisrunde Auflagefläche und zusätzlich einen runden Dübel, der in das Ruder hineingesteckt wird. Das Ruder ist hohl, also wurde unten ein Loch gebohrt und ein rundes Stück Balsa bündig eingeklebt. Darin wurde ein Loch für den Dübel gebohrt und das Ruderhorn an Dübel und Auflagefläche festgeklebt.
Zur Anlenkung wurden die beigelegten Teile, Rudergabeln aus Metall und eine kurze Gewindestange mit Kontermutter, verwendet. Obwohl Löcher und Stifte an Hebeln und Gabeln gut passen, haben die Querruder etwas Spiel. Es ist im Vergleich zum Ruderausschlag sogar recht groß, stört aber praktisch nicht.

Die Servoabdeckungen lagen dem Modell bei. Offensichtlich sollen sie normal geformte Servos von bis zu 16mm Dicke abdecken. Volz bot z.B. Micro-Maxx mit einem Einbaurahmen aus Holz an. Den hätte man einfach innen auf die Beplankung der Flügeloberseite kleben können, die Montage wäre in 5 Minuten getan gewesen.
Ich wollte es perfekt machen und habe spezielle Flügelservos Super FL-BB von Multiplex gekauft. Die sind zwar ganz flach und ragen nicht aus dem Flügelumriß heraus, aber dafür sind sie viel länger bzw. breiter als normale Servos. Mühsam mußte ein Ausschnitt in die innere Rippe gefräst werden, damit das Servo etwas hindurchgesteckt werden kann. Dann war es wieder einfach: Servo in Schrumpfschlauch einschrumpfen und mit Silikon innen an die obere Beplankung kleben. Hier sieht man das Servo im Schrumpfschlauch etwas durch die Rippe ragen.
Das Servokabel wird vor der Montage kurz abgeschnitten. Vom beigelegten verdrillten Kabel wird ein passendes Stück angelötet und mit dünnem Schrumpfschlauch isoliert und zugentlastet. Im Holmsteg ist ein Loch zur D-Box, und bis zur Wurzelrippe sind Löcher in den Rippen. Ein Faden ist eingelegt, mit dem man das Servokabel jetzt durch die D-Box bis aus der Wurzelrippe heraus ziehen kann.

Dort wird ein dreipoliger Stecker angelötet. Die beigelegten Stecker und Buchsen mit versilberten Kontakten habe ich durch kleinere mit vergoldeten Kontakten (Multiplex Servostecker) ersetzt. Der Stecker wird in das ovale Loch eingeklebt. Die zugehörige Buchse wird später in die Endrippe des Innenflügels geklebt, indem man die Buchse halb auf den Stecker drückt und die Flügelteile passend aneinanderschiebt.
Die Flügelsteckung ist sehr präzise und leicht. Weil sie relativ weit außen liegt, braucht sie nicht sehr große Biegekräfte auszuhalten. Zu Anfang sitzt sie sehr stramm, wird aber nach mehrmaligem An- und Abstecken zusehends leichtergängig. Wegen der kurzen Hebel kann der Außenflügel dann auch merklich 'wackeln', was in sehr schnellem Flug zu spektakulärem Flattern führen kann. Da hilft dann nur langsamer (normal) zu fliegen.

Beide Endrippen wurden mit Klebefilm gegen Ablösen der Bespannung gesichert. Der Film trägt ziemlich auf, weil er um die Rundung herum eingeschnitten und überlappt geklebt werden muß. Dadurch liegen die beiden Rippen nicht ganz eng aneinander und es entsteht ein schädlicher Spalt. Ohnehin müssen die Flügelteile im montierten Zustand mit Klebefilm gesichert werden, und dabei kann man gleich auch den Spalt abdecken. Ich benutze dazu recht steifen Polyesterfilm, der sich leicht wieder abziehen läßt.
Am Innenflügel werden links und rechts die Buchsen eingeklebt, nachdem ein Stück verdrilltes Kabel angelötet wurde. Das wird mit dem eingelegten Faden durch die D-Box gezogen.
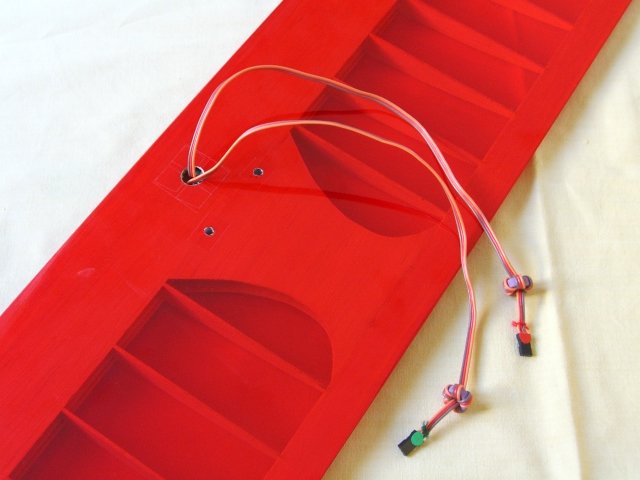
Innen werden normale Servokabel mit Stecker angelötet und mit Schrumpfschlauch isoliert. Die Lötstellen liegen noch im Flügel. Die herausstehenden Kabel sind so lang, weil sie beim Aufbau des Modells durch den Rumpf nach vorne zum Piezo-Kreisel gezogen werden müssen. Die Filterringe sollen einerseits Störungen abfangen, welche die Kabel im Flügel einfangen. Andererseits sollen sie die Länge der Servokabel für Hochfrequenz begrenzen, da die Servokabel Teil der Antennenabstimmung des Empfängers sind.
Antrieb
Der Antrieb besteht aus einem Propeller aeronaut CAMcarbon 14x8" mit Nabe und Spinner, Motor Plettenberg HP 200/25/5 mit Getriebe 4,4:1, Steller Schulze smart-45bo und dem Antriebsakku Sanyo 7N-2400 RC. Diese Kombination wurde von CHK empfohlen, und ich habe Propeller und Motor auch bei CHK gekauft. Den Steller hatte ich 'vergessen' und bei Schulze nachgekauft. Der Antrieb ist sehr gut abgestimmt und hat einen (rechnerischen) Gesamtwirkungsgrad von mehr als 50% zwischen 14 und 21 m/s Fluggeschwindigkeit. Mit einer Akkuladung kann das Modell theoretisch bis zu 1600 m Höhe gewinnen.
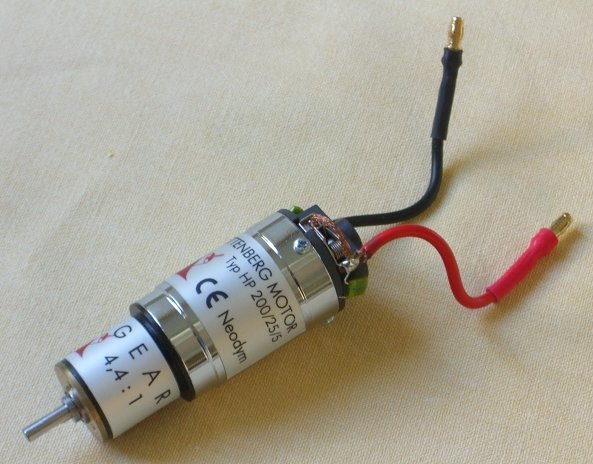
Der Motor hat den guten Wirkungsgrad wegen der Neodym-Magnete, der Kugellager und der guten Bürsten. Das Getriebe ermöglicht langsam drehende, große Propeller mit gutem Wirkungsgrad und hat selbst auch nur geringe Verluste. Beides zusammen wiegt erstaunlich wenig, nämlich nur 184g. Das war auch ein Grund, diesen Antrieb zu wählen. Der Preis war eigentlich weniger entscheidend, obwohl ich zu einem deutlich teureren bürstenlosen Antrieb auch gleich den deutlich teureren Sun Wind – auch von CHK – als Modell genommen hätte. (Die beiden Modelle und die empfohlenen Antriebe kann man sich noch – einschließlich Preise in DM – auf alten CHK-Webseiten im Web Archive anschauen.)

Die Bürsten sind aus Kohle, laufen leicht ein und haben geringen Widerstand. Auf der Lagerbrücke steht übrigens 'Sagami' und das leichtgängige Getriebe könnte von Maxon sein. Wer weiß, was Plettenberg an dem Motor selber gemacht hat, aber das ist eigentlich gleichgültig. Der Motor kam bereits eingelaufen und entstört und er läuft sehr ruhig und sauber. Ein bürstenloser Antrieb hatte gegenüber diesem kaum einen Vorteil. Ich habe gerade beim Bürstenmotor einen Vorteil gesehen: Im Jahr 2002 waren die Steller für Bürstenlose noch nicht ganz ausgereift und man hörte oft von Problemen beim Anlauf und bei kleinen Drehzahlen. Das wollte ich nicht selber ausprobieren und habe mich deshalb für die damals sichere und billigere Lösung entschieden. Wie oben geschildert brauchte ich unbedingt den Antrieb auch als Bremse. Teillastfest sollte er auch sein für 'Schleichfahrt' in Thermikpausen.
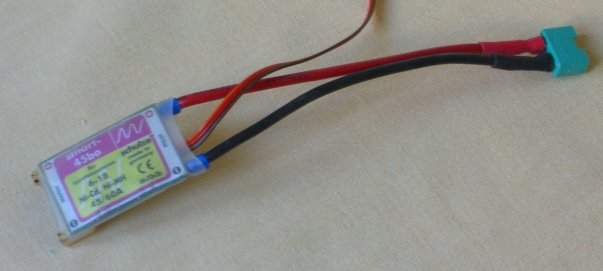
Es gab einige sehr gute Steller, aber Plettenberg und Schulze schienen einfach zusammenzugehören. Der smart hat natürlich die Bremse für Faltpropeller, welche den Motor anhält und die Blätter anklappen läßt. Er kann aber auch den Motor ganz langsam drehen lassen, obwohl der Unterschied zu Stellern für bürstenlose Motoren nicht gar so groß ist. Jedenfalls dreht der Propeller dann im Fahrtwind und entwickelt große Bremskraft. Der Steller hält das aus, und er ist auch besonders teillastfest, wenn er in einen speziellen Freilaufmodus geschaltet ist. Die Wärmeentwicklung ist erstaunlich gering, die elektrischen Verluste sind es also auch.

Das 'o' in der Bezeichnung smart-45bo steht für Optokoppler. Bei einem Segler, der bis an die Sichtgrenze geflogen wird, wollte ich die im Modell selbst erzeugten Störungen des Empfängers minimieren. Der Steller hat kein BEC, also braucht man einen Empfängerakku, was im Thermik-Star aber kein (Gewichts-) Problem darstellt. Dafür können keine Störungen vom Steller in den Empfänger gelangen.
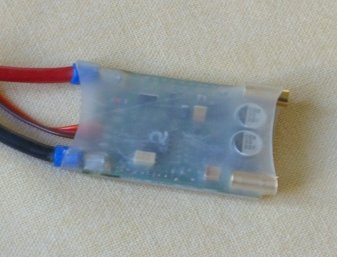
Der gute Wirkungsgrad des Stellers ist sicher auf die verwendeten Bauteile und die Schaltung zurückzuführen. Der Steller ist auch klein und leicht und braucht kein Kühlblech. Der Motor wird mit zwei 3,5mm Goldsteckern angeschlossen (lagen dem Steller bei), an der Akkuseite verwende ich (bei allen Modellen) MPX-Stecker. So könnte der Steller sogar leicht in andere Modelle wechseln, aber wirklich wichtig ist es wohl nur, den Steller ganz ausbauen zu können und beim Einstellen der Fernsteuerung den Motor abzutrennen.

Mit NiMH-Akkus habe ich bisher keine guten Erfahrungen gemacht, der NiCd ist robuster und zuverlässiger. Im Segler hat der Antrieb auch nur recht kurze Laufdauer (für die Steigflüge), dann aber mit großem Strom. Die 20A des Antriebs wären zwar auch für einen NiMH kein Problem, aber der NiCd läßt sich schneller wieder aufladen. Der Sanyo N-2400 RC (eigentlich CP-2400SCR ?) ist ein sehr bewährter Akku mit gutem Kapazitäts / Gewichts-Verhältnis. Das Gewicht ist also gar nicht besonders hoch und zudem als Ballast erwünscht, um dem Modell eine gute 'Durchschlagskraft' zu verleihen. Für schwache Thermik, z.B. gegen Abend, würde man keinen NiMH einbauen, sondern einfach einen kleineren und leichteren NiCd, der 20A Strom aushält (z.B. CP-1300SCR, 200 g leichter). Dann könnte man auch nur 6 Zellen verwenden, was den Strom auf weniger als 15 A begrenzen (und weitere 35 g sparen) würde.
Einbauten
Der Thermik-Star ist wirklich 'fast fertig', die schwierigen Arbeiten sind vom Hersteller gemacht. Damit meine ich die Befestigung von Flügel und Leitwerk und den Motorspant. Man muß selber nur noch Antrieb und Fernsteuerung einbauen, wobei man ja meist auch individuelle Wünsche und Vorstellungen hat. Nach meinen Erfahrungen mit dem Thermik-Star würde ich beim nächsten Modell noch mehr von CHK machen lassen. Das wird alles sehr gut, und die eigenen Ideen bringen gar nicht viel.

So gut würde ich das nicht hinbekommen! Kauft man den Antrieb bei CHK, kann man auch den passenden Motorspant gleich einbauen lassen. Der sitzt dann genau richtig mit Sturz und Seitenzug. Der mitgelieferte Spinner kann mit kleinem Spalt montiert werden und fügt sich in die Rumpfform ein. Der Motor wird mit drei Schrauben befestigt und dann der Propeller mit Spinner auf der Welle festgeschraubt (alle Verbindungen mit Sicherungslack versehen). Die Blätter müssen vielleicht entgratet werden, am Mittelstück montiert und das ganze ausgewuchtet. Es empfiehlt sich, den Antrieb bei CHK zu kaufen, weil er dann präzise eingebaut ist und sehr gut zum Modell paßt. Was soll man da selbst besser machen?

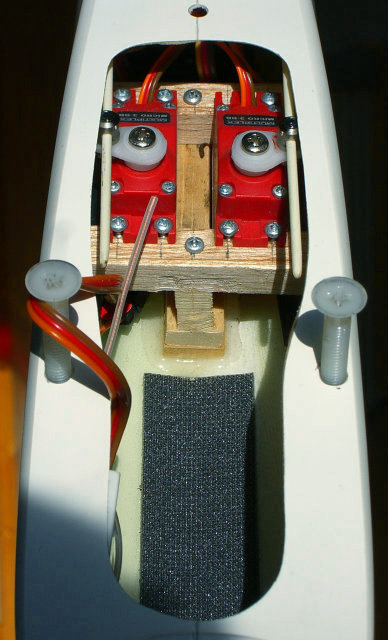
Hier sieht man, daß der Motor mit Seitenzug und Sturz eingebaut ist. Die Kabel führen zum Steller, der mit Klettband flach am Rumpfboden befestigt ist, damit er nicht während des Fluges vibrieren kann. Er sitzt unterhalb des (buchstäblich) schwarzen Kastens, aus dem die vielen Servokabel herauskommen. Das ist der Piezo-Kreisel für die Querruder. Es war kein anderer Platz im Rumpf zu finden, wegen des nötigen Raumes, der Zugänglichkeit und der Schwerpunktlage. Die beiden Geräte stören sich aber gegenseitig offenbar nicht merklich. Man erkennt auch, daß der Kreisel mit Klettband an einem Träger befestigt ist. Eigentlich sollte es eine Konstruktion aus Aluminium werden, aber das Muster aus Wellpappe war schon so gut, daß ich es gelassen habe. Unten ist eine Zunge (weiß) auf dem Rumpfboden angeklettet, oben liegt ein Quersteg auf den Rumpfseiten auf und wird von der Haube noch angedrückt.

Warum der Kreisel hauptsächlich um die Hochachse und nur 30° um die Längsachse eingebaut ist, wie man hier sieht, habe ich bei der Beschreibung des Fuzzy Pro erwähnt. Dort sind weitere Hinweise zu finden.
An den Kreisel kommt man sehr gut heran, kann ihn einstellen und die LED zur Kontrolle sehen. Hinten kommen drei Kabel heraus, links und rechts zu den Querruderanschlüssen am Empfänger, in der Mitte zum Kanal 6 am Empfänger, mit dem die Wirkung des Kreisels eingestellt wird. Vorne werden die Kabel von den beiden Querruderservos eingesteckt. Bei der Montage des Modells werden sie von der Rumpföffnung unter dem Flügel durch den Rumpf nach vorne geführt und nach der Farbmarkierung richtig eingesteckt. Bei Verwechslung würde nicht die Richtung, aber der Ausschlag der Querruder vertauscht, was zu Beschädigungen führen könnte.
Wegen der Antennenwirkung der Servokabel im Flügel ist je ein Filterring angebracht. Man sieht übrigens den grünen Akkustecker des Motorstellers und links den weißen Quader des Picolario. Der 'Kabelsalat' ist zwar nicht ganz absichtlich zustande gekommen, aber er bleibt absichtlich so, siehe hier.

Das ist der Rumpfausschnitt unter dem Flügel. Links und rechts sind die Löcher für die Nylonschrauben, mit denen der Flügel befestigt wird. Darunter sind Holzklötze angeharzt, in die Gewinde für die Schrauben geschnitten sind. Ich habe gestaunt, aber es hält.
Vorne ragt der Stecker des Empfängerakkus heraus. Darunter ist ein dunkler Streifen Klettband zu sehen, der auf den Antriebsakku geklebt ist. Er hält den Empfängerakku in der gewünschten Lage. Der Antriebsakku wiederum ist mit Klettband auf dem Rumpfboden fixiert, was zwar primitiv ist, aber sehr gut hält.
Der Empfängerakku ist ein KR-1100AEL NiCd mit 4 Zellen. Er reicht für 3 bis 4 Stunden Flugzeit aus. Für Flüge in schwacher Abendthermik könnte man auch einen leichteren Empfängerakku verwenden. Ein N-500AR spart noch einmal 36 g Gewicht und reicht 1,5 bis 2 Stunden.
Beide Akkus müssen so weit wie möglich hinten liegen, damit das Modell nicht kopflastig ist. Sie müssen an die hölzerne Befestigung der beiden Leitwerksservos anstoßen, welche schon halb hinten im Rumpf verschwinden. Das Loch hinten in der Mitte (unten im Bild) wurde gebohrt, um an die Schraube der hinteren Servobrücke heranzukommen.
Die beiden Servos sind auf zwei Querträger ('Brücken') aus 10x10mm Balsa geschraubt. Zwischen den Servos ist eine Lücke. Auf den Rumpfboden wurde mittig und längs ein Stapel Leisten geklebt, auf den dann die Servobrücken geschraubt werden. Sie stoßen links und rechts an die Rumpfseitenwände und halten die Servos sauber in ihrer Position. Die Leisten sind mit Silikon auf den Rumpfboden geklebt. Das hält sehr gut und ist trotzdem elastisch. Vielleicht sollte ich das zum Patent anmelden?
Der Rumpf ist sehr leicht gebaut und deshalb biegsam. Er ist fest genug, aber wenn man ihn durch eingeklebte Spanten oder Servobretter versteifen würde, könnte er durch einen Landestoß brechen. So aber kann sich der Rumpfboden ruhig hochdrücken und die Rumpfseiten seitlich hervorbiegen. Die Servos lösen sich nicht, weil sie nur unten und elastisch befestigt sind.

Die Servos müssen an dieser Stelle sein, weil dort die Hüllen der Bowdenzüge enden, die von CHK bereits eingeharzt sind. Ich habe nur die mitgelieferten Stahldrähte durch GFK-Stäbe ersetzt, die dicker sind und dadurch besser in den Hüllen geführt werden. Vor allem stören sie nicht den Empfang der parallel liegenden Antenne.
Hinter den Servos erkennt man gerade noch den schwarzen Empfänger. Auf den Rumpfboden wurde mit Klebefilm ein Schaumstoffstück geklebt. Darauf wird der Empfänger mit Klettband befestigt – herausnehmbar, elastisch und gedämpft.

Hier noch ein Blick nach vorne rechts. Der Empfängerakku ist links eingelegt, so daß das Picolario rechts an die Rumpfseite geklettet werden kann. Unter dem Rumpfrücken vor dem Flügel liegt es gut und läßt genügend Platz, um die Kabel der Querruderservos samt Filterringen nach vorne durchzufädeln. Man kommt auch noch mit dem Zeigefinger an den Taster des Picolario heran. Gut zu sehen ist hier das rechte Gewindestück der Flügelbefestigung.
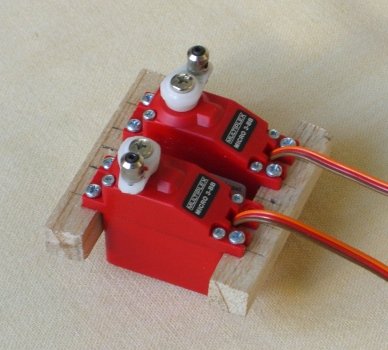
Das ist der Servoblock. Die Micro 3-BB von Multiplex halte ich für sehr gute konventionelle (nicht digitale) Servos, die es aber schon lange nicht mehr gibt (auch nicht als Digitalservos). Sie sind nicht um jeden Preis miniaturisiert und sehr solide. Außerdem haben sie einen erstaunlich geringen Stromverbrauch. Das gilt übrigens alles auch für die prinzipiell ganz ähnlichen Flügelservos Super FL-BB.
Wegen der kurzen und etwas schrägen Hebel der Ruderhörner mußten auch die Servohebel kurz sein und in Neutralstellung etwas schräg. Das kann man mit den beigelegten Servohebeln leicht erreichen. Einen vierarmigen Hebel setzt man so auf die Verzahnung der Servowelle, daß die richtige Schräge erreicht wird, und schneidet die übrigen drei Arme sowie Überlänge ab.
Für Gabel- oder Kugelköpfe ist aber kein Platz, und so mußte ich die von CHK mitgelieferten Klemmstücke verwenden. Leider habe ich es nicht geschafft, die Löcher in den Servohebeln genau auf den richtigen Durchmesser aufzubohren. Die Ruderanlenkung hat also Spiel, aber glücklicherweise nicht so viel, daß es unangenehm wäre.

Hier sieht man, daß kleinstes Spiel schädlich ist, weil die Hebel so kurz sind. Eigentlich wollte ich 'richtige' Ruderhörner für V-Leitwerke, aber die hätten sehr präzise eingeklebt werden müssen. Die von CHK vorgesehenen Alubleche sind viel einfacher zu verwenden. Sie sind angespitzt und werden in das weiche Balsa der Ruder hineingedrückt. Wenn man dabei das Ruder zwischen Bretter klemmt, kann das weiche Balsa auch nicht aufreißen. Ohnehin werden die Blechstreifen mit dünnflüssigem Sekundenkleber fixiert, der das Holz härtet.
CHK hat abgewinkelte Drähte als Stoßstangen vorgesehen. Die Blechstreifen hatten Löcher, in welche die abgewinkelten Stücke hineinragen sollten. Das wäre bestechend einfach und leicht demontierbar. Mich störte aber das Reiben von Metall auf Metall und das Spiel dieser Anlenkung. So habe ich die Blechstreifen rechtwinklig umgebogen und die Kugelköpfe angeschraubt. Die Ruderhörner müssen ohnehin durch Biegen auf gleiche Geometrie links und rechts justiert werden.
Die Gegenstücke sind aus Nylon. Es passen nur diese kurzen Teile, weil schon bald die Bowdenzughüllen anfangen. Die Nylonteile haben Gewinde für die üblichen Stoßstangen aus Draht. In die GFK-Stäbe kann man kein Gewinde schneiden, kleben hält nicht, also was tun? Lösung: Die GFK-Stäbe mit Gewalt in die Gewindelöcher hineindrücken, so daß sie nur mit Gewalt wieder herausgehen würden.
Hinten ist die Ruderanlenkung also spielfrei, kurz und leicht. Sie ist in der Rumpfschale gut geschützt, aber beengt. Bei Bewegung stoßen die Hörner aneinander und schleifen am Rumpf. Das ist aber nicht schlimm und alles biegt sich elastisch aneinander vorbei. Die Kugelköpfe sitzen so fest, daß man sie und damit das ganze Leitwerk nicht mehr leicht demontieren kann. Es bleibt deshalb dauernd am Rumpf.
Weil die Stoßstangen nun aus Kunststoff sind und nicht mehr Metall auf Metall reibt, kann man die Antenne buchstäblich ungestört im Rumpf verlegen. Ein Stück hängt noch hinten heraus und wird mit einem Tropfen Silikon fixiert.
Die möglichst spielfreie Anlenkung der Ruder weitgehend ohne Metall war das einzige, das ich unbedingt anders haben wollte als von CHK vorgesehen. Die Ruderanlenkung hat viel Arbeit gemacht, die man wahrscheinlich nicht auf CHK abwälzen könnte. Vermutlich würde Herr Kraus bei seiner Lösung bleiben wollen, aber einen Versuch wäre es wert, ihn umzustimmen.
Gewichte
| Rumpf und Leitwerke ohne Einbauten | 235g |
| Propeller aeronaut CAMcarbon 14x8" mit Nabe und Spinner | 32g |
| Motor Plettenberg HP 220/25/5 Getriebe 4,4:1 | 184g |
| Regler Schulze smart-45bo | 22g |
| Antriebsakku Sanyo 7N-2400 RC (alternativ 6x Sanyo CP-1300SCR |
442g 207g) |
| Empfängerakku 4x Sanyo KR-1100AEL mit Kabel (alternativ 4x Sanyo N-500AR |
128g 92g) |
| Empfänger Multiplex Micro-IPD 7 Kanäle | 28g |
| Querruder-Kreisel ACT Fuzzy Professional | 36g |
| Variometer Renschler Picolario Talk | 24g |
| 2 Servos Multiplex Micro 3-BB | je 26g |
| Flügel ohne Einbauten | 405g |
| 2 Servos Multiplex Super FL-BB | je 28g |
| Flügel komplett | 502g |
| Modell komplett (alternativ |
1720g 1450g) |
Flugleistungen
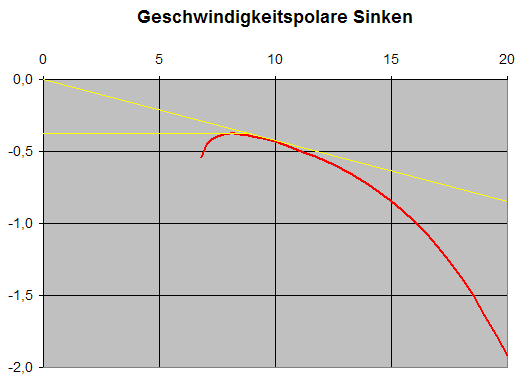
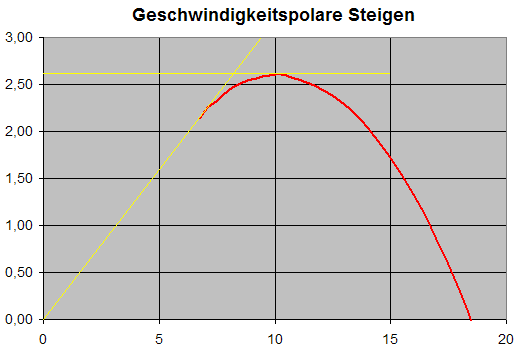
Das Diagramm zeigt die nachgerechnete Geschwindigkeitspolare für das Gleiten. Waagerecht ist die Vorwärtsgeschwindigkeit aufgetragen, senkrecht die Sinkgeschwindigkeit, beides in m/s. Rechnerisch müßte der Thermik-Star ein geringstes Sinken von 0,38 m/s bei 8,3 m/s haben und ein flachstes Sinken von 0,43 m/s bei 10,0 m/s. Das bedeutet eine beste Gleitzahl von 23,2 und ist ganz ordentlich für ein solches Modell (und für das Gewicht von 1,72 kg). Gemessen sind die Werte nicht, aber das Modell macht schon den Eindruck, daß es so gut ist.
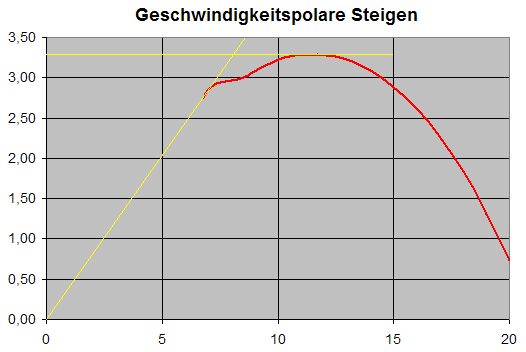
Die nachgerechnete Geschwindigkeitspolare für das Steigen mag etwas überraschen. Das steilste Steigen beträgt etwa 2,8 m/s bei einer Horizontalgeschwindigkeit von nur 7 m/s. Das sieht in Wirklichkeit auch so aus. Buchstäblich paradox sieht es aber aus, wenn das Modell am schnellsten steigt, nämlich 3,3 m/s bei 11,7 m/s horizontal. Die größte Steighöhe wird sogar bei 13,4 m/s horizontal erreicht, das sind knapp 50 km/h. Auch wenn man nicht den Eindruck hat - das Variometer zeigt, daß es stimmt. Es hängt einfach mit den Eigenschaften des Antriebs zusammen. Die rechnerische Höchstgeschwindigkeit im Horizontalflug ist übrigens knapp 80 km/h.
Der Antriebsakku N-2400 RC erreicht nur 2,3 Ah Kapazität oder sogar weniger. (Sanyo selbst gibt nur 2,3 Ah an.) Man sollte zur Sicherheit mit 20 A Maximalstrom und folglich nur mit 6,5 Minuten 'Vollgas'-Flugzeit rechnen. Das reicht rechnerisch für insgesamt etwa 1500 m Steighöhe. Ich fliege das Modell aber nicht tiefer als 100 m, wenn eine Thermikblase verschwunden ist. Mein Flugfeld ist recht eng begrenzt und ich kann nicht einfach an anderer Stelle eine neue Thermikblase suchen. Vielmehr halte ich das Modell mit 'Schleichfahrt' auf Höhe, bis die nächste Thermikblase kommt. Bei ¼ 'Gas' reicht der Akku dann deutlich länger, etwa 20 bis maximal 30 Minuten.
Eigentlich ist der Thermik-Star nicht das speziell passende Modell für diese Bedingungen. Ein weniger elegantes, langsameres Modell mit schwachem, aber bei 'Schleichfahrt' (und nicht auch im 'Vollgas'-Steigflug) besonders effizientem Antrieb würde ausreichen. Aber der Thermik-Star ist einfach ein sehr schönes und leistungsfähiges Modell für alle Bedingungen.
Das gilt auch, wenn man im Sommer noch ein bis zwei Stunden in Abendthermik fliegen will. Mit den oben angegebenen kleineren Akkus hat der Thermik-Star weniger Gewicht, Leistung und Stromverbrauch. Die Steiggeschwindigkeit ist aber immer noch anständig und 'Schleichfahrt' in Thermikpausen geht bis zu 20 Minuten. Das ist das wichtigste, um oben zu bleiben. Die Sinkgeschwindigkeit ist kaum geringer, aber die Vorwärtsgeschwindigkeit, so daß engeres Kreisen möglich ist.
Flugeigenschaften
Die Einstellwinkeldifferenz ist durch den Rumpf fest vorgegeben und paßt sehr gut, der angegebene Schwerpunkt ebenfalls. Seiten- und Höhenruder sind sehr gut dimensioniert. Ihre Wirksamkeit ist genau richtig, gleichgültig ob der Motor läuft oder nicht. Man sagt zwar, daß der Thermik-Star mit den großen Flügeln träge auf Querruder reagiert. Ich finde die Wirksamkeit aber völlig ausreichend, zumindest für einen Thermiksegler. Auch die Wirkung der hochgestellten Querruder (Spoilerons) ist gut. Trotz Differenzierung der Querruderausschläge braucht man aber auch viel Seitenruder. Man kann es durch die Combi-Funktion im Sender erzeugen lassen, mit Flugphasen sogar unterschiedlich: mehr bei Ausschlag der Spoilerons und weniger im Schnellflug.
Nur auf eines sollte man achten: Als Thermiksegler ist das Modell recht stabil getrimmt und bäumt sich in Böen leicht auf. Das Problem ist, daß schnell die ganze Fahrt abgebaut ist und die Ruder keine Wirkung mehr haben. Das führt zu unschönem Pumpen und Höhenverlust. Wenn in Bodennähe der Wind wegbleibt, sackt das Modell durch und schlägt wahrscheinlich mit dem Spinner auf. Die empfohlene Schwerpunktlage macht das Modell so schnell, daß es leichter durch Böen 'schneidet' und schnell Fahrt aufholt. Also nur bei ruhigem Wetter den Schwerpunkt weiter nach hinten legen und bei Wind lieber 'laufen lassen'!
Fazit
im Telegrammstil:
- hervorragendes Thermikmodell
- sehr gute Flugeigenschaften
- sehr gute Flugleistungen
- elegant und kräftig gebaut
- Teile passen sehr genau
- ausreichend robust
- nur noch Fernsteuerung einzubauen
- Qualität sehr gut
Weiteres
Im Aufwind-Magazin Heft 2/2001 ist anläßlich des 25-jährigen Firmenjubiläums von CHK ein Artikel über den Thermik-Star erschienen, in dem viele nützliche Informationen über den Bau, Motorisierungen, das Flugverhalten, Ruderausschläge usw. zu finden sind. Nur der Empfehlung, den Rumpf durch einen Spant zu "verstärken" (eigentlich versteifen), würde ich ausdrücklich widersprechen (Grund: siehe oben, Servo-Einbau).
Im Internet hatte ich bei Modellflugjugend.de einen Artikel über denThermik-Star gefunden, der leider auch im Web Archive nicht mehr zu finden ist. Im RC-Network gibt es immer noch einen Thread mit Erfahrungsberichten.
Die Bauanleitung von CHK für den Thermik-Star Spezial umfasst nur drei Seiten, enthält aber alle Informationen, die man zum Bau braucht, und hundertprozentig passende Einstellhinweise.
Mit 'Plane Geometry' von Blaine K. Beron-Rawdon wurde auch der Thermik-Star nachgerechnet. Die Excel-Blätter 'MeasureV' und 'DesignV' sowie 'RadGyr' aus 'Plane Geometry' mit den Daten des Thermik-Star biete ich hier an. Um das Urheberrecht zu wahren, sind alle Berechnungsformeln entfernt und es gibt keine Dokumentation von 'Plane Geometry'.
Weil 'Plane Geometry' nur die Flugeigenschaften in Form von Kennwerten beschreibt, wurden auch der Antrieb und allgemein die Flugleistungen des Thermik-Star nachgerechnet. Die dazu von mir selbst entwickelten Excel-Blätter mit den Daten des Thermik-Star biete ich ebenfalls hier an.
Zum Üben habe ich die Flugeigenschaften des Thermik-Star (mit Hilfe der Daten aus 'Plane Geometry') für den Simulator REFLEX abgebildet. Das Aussehen wurde dann mit RMK auch abgebildet. Dazu gibt es hier eine eigene Seite. Dort sind auch die Modelldateien für den REFLEX zum herunterladen zu finden.
Modernisierung 1
Es hat eine Weile gedauert, aber jetzt (2010) bin ich endlich darauf gekommen: Mit der neuen Akku-Technik läßt sich der Thermik-Star doch zu dem machen, was ich mir vorgestellt habe – zu einem langsamen Floater mit effizientem Antrieb. Werden die beiden NiCd-Akkus durch A123-Akkus ersetzt, spart man 300g und 40g ein und kommt auf ein Gesamtgewicht von 1,38 kg. Zwei Zellen A123 wiegen eben nur 142g statt der 442g von 7 Zellen NiCd (und 88g statt 128g für den Empfängerakku mit 2 statt 4 Zellen). Die Kapazität der A123-Akkus ist dieselbe wie die der NiCd.
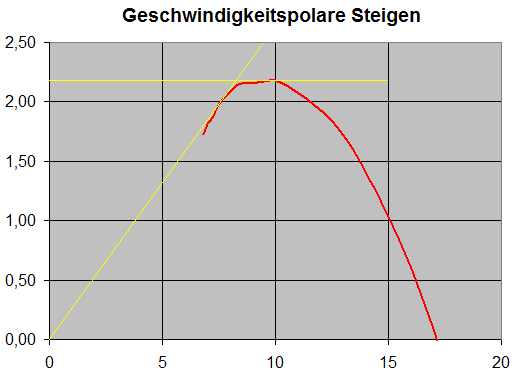
Natürlich ist die Spannung geringer (6,6 V statt 8,4 V Nennspannung) und deshalb die Leistung des Antriebs. Das Verhältnis von Standschub zu Gewicht ist aber immer noch 0,52 und die beste Steiggeschwindigkeit reicht mit 2,2 m/s bei weitem aus, um das Modell schnell auf Thermikhöhe zu bringen. Mit einer Akkuladung wären rechnerisch 1500 m Höhe zu erreichen. Das ist aber nicht meine Absicht.
Vielmehr möchte ich das Modell auf 100 m Höhe bringen, wo die Thermikblasen so groß sind, daß Kreisen darin bequem möglich ist. In Thermikpausen soll das Modell nicht unter diese 100 m geraten, also muß es mit der erwähnten "Schleichfahrt" dort gehalten werden. Durch die geringere Spannung läuft der Antrieb auch mit geringerer Drehzahl (2350 U/min). Der Propeller arbeitet nun bei Schwebegeschwindigkeit mit seinem besten Wirkungsgrad von 75% und verleiht dem Antrieb einen Gesamtwirkungsgrad von fast 50%. Selbst im Steigflug mit voller Leistung ist der Gesamtwirkungsgrad dank geringer Drehzahl (4000 U/min) noch 50%.
Rechnet man das Steigen auf 100 m oder mehr von der Kapazität des Akkus ab, bleibt immer noch genug für mehr als 30 Minuten Schwebeflug. Das sollte ausreichen, um die Thermikpausen während eines Nachmittags zu überbrücken. Man könnte auch 4 Zellen (2s2p) A123 einsetzen und so die Motorlaufzeit sogar auf 60 Minuten verdoppeln. Das würde das Gewicht nur um 140g auf 1,52 kg erhöhen und die Steig- und Flugleistung nicht wesentlich beeinträchtigen.
Man könnte oder müßte noch mehr modernisieren. Der 35 MHz Empfänger verträgt die bis zu 8 V Spannung von 2 A123-Zellen, die Servos aber wahrscheinlich nicht. Man müßte sie duch neue ersetzen oder einen Spannungsregler einbauen. Man könnte den Getriebemotor durch einen bürstenlosen Außenläufer (z.B. AXI 2814/20) ersetzen und 80g sparen. Man bräuchte aber auch einen neuen Regler, der wahrscheinlich 20g schwerer ist. Mit meinem neuen Sender ROYALpro9 und 2,4 GHz mit Rückkanal könnte ich einen neuen Empfänger verwenden und das Picolario durch ein Variometer von Multiplex ersetzen. Die Gewichts- und Stromersparnis wäre minimal, ebenso der Nutzen. Nur die Akkus zu ersetzen ist also optimal.
Modernisierung 2
Aber nicht so interessant. Den Empfänger und das Picolario zu ersetzen wurde (2014) interessant, weil das Umbauen des Senders auf 35 MHz lästig wurde und das zusätzliche Funkgerät für das Picolario schon immer umständlich war. Mit 2,4 GHz können verschiedene Meßwerte, unter anderem Variometer und Höhenmesser, bequem am Sender angezeigt werden.
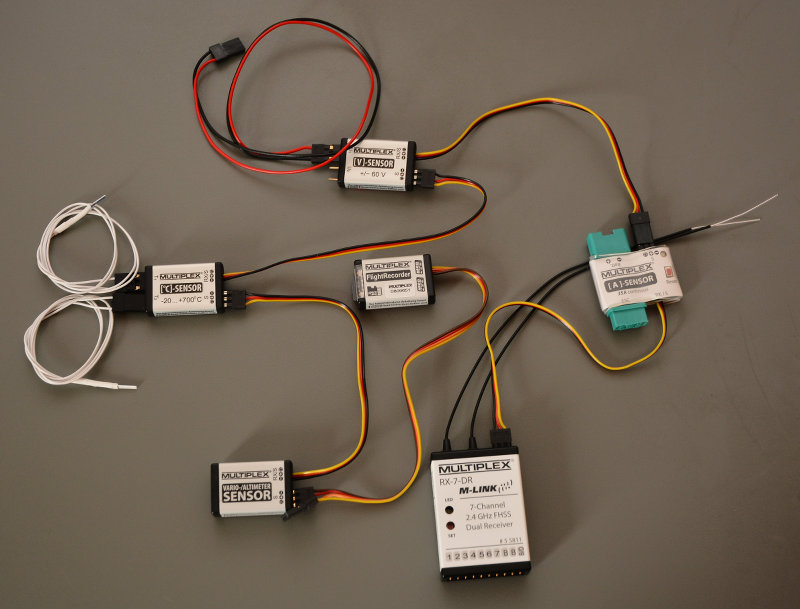
Da wäre also das Variometer, das eigentlich bzw. gleichzeitig ein Höhenmesser ist. Nur das Variometersignal wird akustisch am Sender ausgegeben (mit dem "Piepser" oder in besserer Qualität am zusätzlichen Display), wenn man keinen "Souffleur" (Sprachausgabegerät von Multiplex) hat. Damit kann man leben, das Vario ist der wichtigste Sensor.
Der Flight Recorder zeichnet mit den Daten des Höhenmessers praktisch das Höhenprofil eines Fluges auf. Das kann helfen, mehr über das Thermikfliegen zu lernen.
Der zweitwichtigste Sensor ist der Stromsensor. Multiplex bezeichnet ihn als 'Tankuhr für den Akku', weil er die entnommene oder restliche Ladung anzeigen kann.
Der Temperatursensor mit zwei Fühlern soll die Temperatur von Motor und Regler überwachen. Hier werden noch Überraschungen vermutet, während der Akku kein Problem sein dürfte. Man kann aber einen Fühler auch daran anbringen, um das zu bestätigen.
Der Spannungssensor soll die zwei Zellen des neuen Flugakkus überwachen, nur aus Neugier auf die Spannungsdifferenzen ohne Balancer.
Einen Drehzahlsensor habe ich nicht, weil ich nicht weiß wie ich ihn im Thermik-Star anbringen soll.
Überhaupt sind diese Geräte kaum im Rumpf unterzubringen. Und es entsteht ein unübersichtliches Kabelgewirr, das man nur durch ignorieren ertragen kann.

Eigentlich sind die Akkus der Grund der Umrüstung. Wenn die mehr als zehn Jahre alten NiCd-Akkus nicht unbrauchbar geworden wären, wäre der Thermik-Star nicht im Herbst 2014 umgerüstet worden. Eigentlich sollte ein LiFePo-Antriebsakku hinein, das Problem des Empfängerakkus war ungelöst.
Unter dem Erneuerungsdruck war ein fertiger LiFePo-Akku zu schwer zu bekommen bzw. es hätte viel Arbeit gemacht, ihn aus Zellen selbst zu bauen. Ein LiPo war fertig zu bekommen, einschließlich Adapter für den Multiplex-Stecker, der dann – um Platz zu sparen – doch angelötet wurde. Am heute üblichen Balancer-Anschluß kann auch der Spannungssensor angesteckt werden. Der moderne LiPo-Akku ist erstaunlich hochstrom- und schnellladefähig, angeblich robust und erstaunlich preisgünstig.
Wegen der alten Servos und des geringen Stromverbrauchs wurde wieder ein vierzelliger Nickel-Empfängerakku gewählt, jetzt eben NiMH statt NiCd. Ob die eneloop-Zellen den Strom für die Servos hergeben weiß ich nicht, aber andere Modellflieger haben schließlich keine Probleme damit. Jedenfalls ist die Selbstentladung jetzt gering, so daß man nicht vor dem Fliegen noch lange den Akku laden muß (sondern erst nachher, wenn man Zeit dazu hat).
Die beiden neuen Akkus sparen 265 g Gewicht, die neue Elektronik nichts:
| − Antriebsakku Sanyo 7N-2400 RC | −442g |
| + Antriebsakku 2s1p 3200 mAh LiPo mit Kabel | +196g |
| − Empfängerakku 4x Sanyo KR-1100AEL mit Kabel | −128g |
| + Empfängerakku 4s 1900 mAh NiMH mit Kabel | +109g |
| − Empfänger Multiplex Micro-IPD 7 Kanäle | −28g |
| + Empfänger Multiplex RX-7-DR | +19g |
| − Variometer Renschler Picolario Talk | −24g |
| + Sensoren (Variometer, U, I, T, Recorder) | +38g |
| Modell komplett alt | 1720g |
| Modell komplett neu | 1460g (-260g) |
Der Stromverbrauch des Empfängers und der Sensoren ist relativ hoch. Statt 12 mA (Micro-IPD) und 38/43 mA (Picolario) sind es nun 60 mA (RX-7-DR) und 53 mA (Sensoren), also doppelt so viel. Das macht aber den kleineren Teil des Stromverbrauchs aus (den größeren die Servos) und wird durch die 1900 mAh Kapazität des neuen Empfängerakkus (statt 1100) mehr als ausgeglichen.
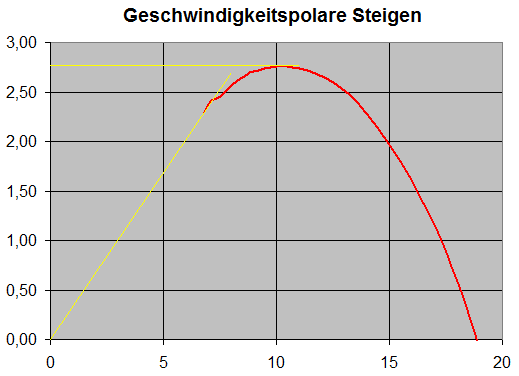
Die Spannung des Flugakkus ist etwas geringer (7,4 V statt 8,4 V Nennspannung) und deshalb die Leistung des Antriebs. Das Verhältnis von Standschub zu Gewicht ist aber immer noch 0,57 (0,60) und die beste Steiggeschwindigkeit reicht mit 2,75 m/s (3,25) bei weitem aus, um das Modell schnell auf Thermikhöhe zu bringen, nämlich in 36 Sekunden (31) auf 100 m. Mit einer Akkuladung wären rechnerisch 2400 m (1500) Höhe zu erreichen. (Werte in Klammern für die ursprüngliche Ausrüstung.)
Die gewünschte "Schleichfahrt" in Thermikpausen sollte 9 m/s betragen, um etwas Geschwindigkeitsstabilität zu erhalten. Der Gesamtwirkungsgrad des Antriebs ist dann 48%, der Motor zieht 3,5 A Strom. Zieht man den Stromverbrauch für den Anfangssteigflug (36 Sekunden 13,7 A) von der Akkukapazität ab, bleiben ungefähr 50 Minuten (30) Schwebeflug. Damit kann man viele lange Thermikpausen überbrücken.
Elektronik
Die elektronischen Komponenten im Modell sind alle recht teuer, aber hochwertig und deshalb ihr Geld wert. Ein Vorteil ist geringer Stromverbrauch. Der Verbrauch von Empfänger, Piezokreisel und Variometer ist gegenüber dem Verbrauch der Servos fast zu vernachlässigen. Das meint natürlich Servos in Bewegung, denn ihr Ruhestrom ist gering. Thermikfliegen bedeutet aber ständiges Bewegen der Ruder, und beim Thermik-Star sind meist alle vier Servos gleichzeitig in Bewegung (2 Querruder und 2 V-Leitwerksruder für Seitenruderwirkung). Die Ströme habe ich einmal in der Werkstatt, sozusagen unter Laborbedingungen, gemessen.
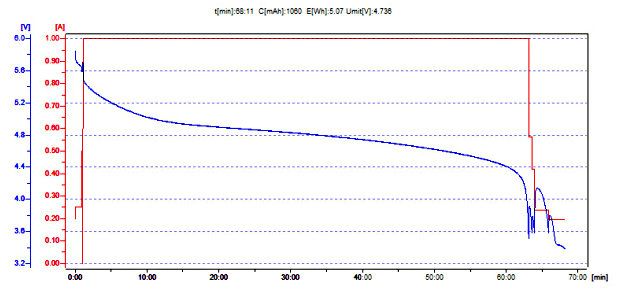
Als Stromquelle diente der Akku 4xKR-1100AEL, nahezu voll geladen. Das ist ein Hochstrom-NiCd-Akku mit einem Innenwiderstand von nur 9 mOhm pro Zelle (Nennwert). Als Empfängerakku sollte man keine Hochkapazitätstype verwenden, weil – entgegen der Bezeichnung – der Empfänger nicht der entscheidende Verbraucher ist. Die Servos ziehen kurze Impulse hoher Stromstärke, die Mikroservos vermutlich 0,6 A. Wenn alle vier Servos gleichzeitig ziehen, macht das 2,4 A und verursacht einen Spannungsabfall von 4 x 9 mOhm x 2,4 A = 0,0864 V. Mit dem KR-1100AAU (19 mOhm pro Zelle) wären es schon 0,1824 V (und der Akku wäre nur 16 g leichter). Verluste durch Kabel und Stecker kommen hinzu. Wenn der Akku nur noch weniger als halb voll ist, könnten die Servos also schon recht träge werden, wie das folgende Entladediagramm (bei 1 A) ahnen läßt.
Der Empfänger Micro-IPD zieht einen Ruhestrom von 12 mA, wenn der Sender eingeschaltet ist. Schaltet man den Sender aus, werden 18 mA verbraucht, warum auch immer. Beides ist sehr gering.
Der Motorsteller smart-45bo braucht ständig sogar nur 6 mA zum Arbeiten.
Das Variometer Picolario talk nimmt immerhin 38 mA auf beziehungsweise 43 mA, wenn es "spricht". Auch das ist noch sehr sparsam.
Der Piezo-Kreisel Fuzzy Pro verbraucht 27 mA Ruhestrom. Den Arbeitsstrom habe ich nicht gemessen, sondern vertraue der Angabe 50 mA von ACT. Wenn man die beiden Querruderservos anschließt und den Kreisel bewegt, dann laufen jedenfalls bis zu 0,8 A aus dem Akku, mit vier Servos eben 1,6 A.
Die Servos Micro 3-BB und Super FL-BB selbst haben einen Ruhestrom von nur 4 oder 5 mA. Der Ruhestromverbrauch von Empfänger, Motorsteller, Variometer, Piezokreisel und vier Servos beträgt zusammen nur etwa 100 mA. Man kann das Modell also bis zu 10 Stunden eingeschaltet liegen lassen. Man braucht aber nur eine halbe Stunde, um den Antriebsakku aufzuladen, mit entladen eines Restes eine Dreiviertelstunde bis Stunde.
Die 0,8 A mit zwei Servos und 1,6 A mit vier sind natürlich Spitzenwerte (wenn auch nur mit einem normalen Meßgerät gemessen, also nicht die wirklichen Impuls-Spitzen). Der durchschnittliche Verbrauch hängt vom Flugstil des Piloten ab (ruhig oder zappelig), von der Thermik (groß und gleichmäßig oder klein und unruhig) und von der Böigkeit. Der Kreisel wirkt recht schnell und belastet die Querruderservos stark. Den Stromverbrauch des Modells im Flug kann ich also nur schätzen.
Nach bisherigen Erfahrungen vermute ich Durchschnittswerte von 0,25 bis 0,3 A. Da man den Empfängerakku zur Sicherheit nicht leerfliegen soll, sind höchstens 3 bis 4 Stunden Flugzeit möglich. Mehr will ich auch nicht, und sonst könnte ich einen anderen Akku verwenden. Übrigens gibt das Picolario auch die Akkuspannung an, so daß man in jedem Fall rechtzeitig landen kann (bei 4,6 V, damit es kein Notabstieg sein muß). Bisher hatte ich immer schon vorher einen steifen Nacken und habe deshalb das Modell gelandet.
Selbsterzeugte Funkstörungen gibt es, wie erhofft, nicht. Weil die Bowdenzüge aus Kunststoff sind, konnte die Antenne im Rumpf nach hinten verlegt werden und dort noch ein Stück heraushängen. So ergeben sich gute Empfangsbedingungen und Schutz vor Störungen.
Der Motor ist gut entstört und der Drehzahlsteller ist ganz ruhig. Sonst würde man in der Sprach- und Tonübertragung des Picolario das typische Knistern, Knacken, Brummen und Rauschen hören. Auch der Piezokreisel stört nicht und arbeitet selbst ungestört, obwohl er über dem Drehzahlsteller liegt.
Das Variometer liegt, wie empfohlen, ungestört und nicht störend zwischen anderen elektronischen Geräten. Hier gibt es trotzdem ein einziges, kleines Problem. Motor und Antriebsakku werden merklich warm. Die Wärme des Akkus strahlt auf das Variometer, das dadurch offenbar die Höhe nicht mehr richtig angibt (sondern zu niedrige Werte). Dem könnte ich wohl durch eine Aluminiumfolie und Belüftung im Rumpf abhelfen, aber zu einer Öffnung im Rumpf konnte ich mich noch nicht entschließen.
Bei den normalen kurzen Steigflügen auf Thermikhöhe werden Motor und Akku nur warm, ebenso bei 'Schleichfahrt' in Thermikpausen. Motorlaufzeiten von mehr als einer Minute bei Vollast lassen den Akku aber sehr warm werden und den Motor heiß bis zu heiß. Das ist also zu vermeiden.
Kreise(l)n
Blaine K. Beron-Rawdon hatte die Idee, den Kreisflug in der Thermik mit einem Piezo-Kreisel zu stabilisieren. In seinem Artikel beschreibt er, wie man das je nach Kurvenneigung nötige Gegenquerruder mit einem Drehratenkreisel automatisieren kann. Mit der Verstärkung des Kreisels kann man am Sender Spiralsturzstabilität einstellen oder aber ein neutrales Verhalten. Der Fuzzy Pro ist so präzise, daß er auch auf kleine Drehraten reagiert und sauber die Servomittelstellung halten kann. Außerdem läßt sich der Ausschlag der Querruder begrenzen, so daß kein Spoileron daraus wird.
Es funktioniert alles wie in dem Artikel beschrieben. In Thermik ergibt die mittlere Schieberstellung für die Kreiselverstärkung ungefähr 45° Kurvenneigung, die sogar ohne Seitenruder in Kurvenrichtung, also automatisch gehalten werden. Man kann das und Höhenrudertrimmung in einer Flugphase programmieren und am Sender einfach einschalten. In Turbulenz reagiert der Kreisel recht hart und direkt und man nimmt besser die Verstärkung zurück. In ruhiger Luft kann Geradeausflug mit voller Verstärkung stabilisiert werden. Zur Landung schalte ich den Kreisel aber lieber ab und steuere selbst, vor allem wenn Spoilerons gesetzt sind.
Fail-Safe
Der Empfänger Micro-IPD bietet eine Fail-Safe-Funktion, die man besonders im Thermik-Star gut nutzen kann und allgemein bei einem Segler nutzen sollte. Schließlich verschwindet solch ein Modell schon einmal aus der Reichweite der Fernsteuerung oder das Sendersignal wird von Störungen überlagert. Dann setzt der Empfänger alle Servoausgänge in eine vorbestimmte Position. Die Frage ist nun, welche Positionen es sein sollen und was man damit erreichen will.
Bisher mußte ich es noch nicht ausprobieren, aber ich möchte, daß der Segler in eine flache Kurve geht, um wieder näher zum Sender zu kommen. Der Thermik-Star ist um die Längsachse praktisch nicht eigenstabil, so daß die Gefahr zunehmender Kurvenneigung und schließlich eines Spiralsturzes groß ist. Deshalb wird der Piezo-Kreisel Fuzzy Pro auf volle Verstärkung gesetzt. Schon bei großem Kurvenradius gibt er Gegenquerruder und hält das Modell aufrecht. Die Querruder bleiben ansonsten neutral und nur etwas Seitenruder bewirkt die Kurventendenz. Der Motor ist natürlich ausgeschaltet und etwas Höhenruder sorgt für langsames Gleiten.
Das Variometer Picolario talk wird 'stumm' geschaltet, woran man dann den 'Funkausfall' bemerkt. In diesem Moment würden die Variometer- und Höhenangaben nichts nützen, denn man hat ohnehin keinen Einfluß auf das Modell. Falls man es nicht wieder 'einfangen' kann und es verschwindet, kann man trotzdem das Picolario anpeilen, weil es auch 'stumm' die Trägerfrequenz sendet.
Sensorik
Mit der neuen Elektronik (2,4 GHz) ändert sich an den Servos und am Querruderkreisel nichts.
Der neue Empfänger hat natürlich ebenfalls Fail-Safe, muß aber zusätzlich an den Sender gebunden werden. Fail-Safe kann man jetzt bequem vom Sender aus einstellen und ebenso bequem geht es mit einem Kabel am PC.
Das Picolario wird durch Sensoren im und am Empfänger ersetzt. Alle haben sinnvolle Einstellungen 'ab Werk', die aber im konkreten Modell nicht passen oder zumindest nicht gefallen dürften. Jeden Sensor muß man dann einzeln am PC so einstellen, wie man ihn haben möchte, und erst dann alle Sensoren zum Sensorbus zusammenstecken. Das ist etwas umständlich und man muß sich dazu einen richtigen Plan machen, weil sonst schon bei 5 Sensoren (wie hier) nichts paßt.
Im Display des Senders werden immer 3 Werte gleichzeitig angezeigt. Welche will man also jeweils zusammen sehen? Entsprechend muß man ihnen Zeilennummern geben. Meist kann man Grenzwerte setzen, bei deren Über- oder Unterschreitung der Sender durch einen Ton warnt und die Displayseite mit dem Wert anzeigt. So braucht man nicht selbst durch die Seiten zu blättern.
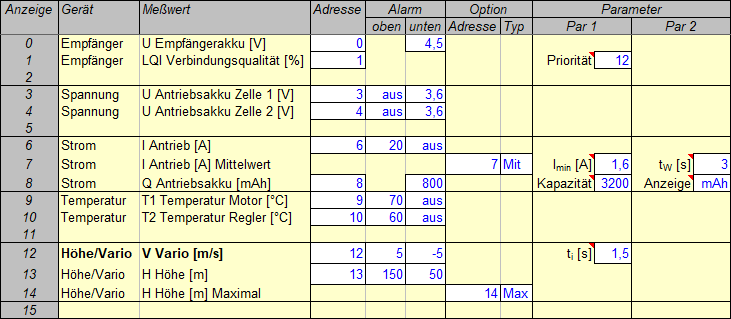
Das ist mein Plan für den Thermik-Star. In der linken Spalte sind die möglichen 15 Werte (0 bis 14) auf 5 Seiten aufgelistet. Rechts davon sind die von mir eingestellten Werte definiert. (Die zusätzliche Zeile Nummer 15 ist nur auf einem Zusatzdisplay darstellbar oder kann vom Souffleur angesagt werden, siehe unten.)
Die Werte (0) Empfängerspannung und (1) Verbindungsqualität auf Seite 0 werden immer vom Empfänger selbst geliefert.
(3) und (4) auf Seite 1 sind die Zellenspannungen des Antriebsakkus. Bei Unterschreiten von 3,6 V soll gewarnt und die Seite angezeigt werden.
Die wichtigen Daten des Antriebsakkus auf Seite 2 sind (6) momentaner Strom, (7) durchschnittlicher Strom (wenn länger als 3 Sekunden größer als 1,6 A) und (8) Restladung mit Warnung bei weniger als 800 mAh (25% von 3200 mAh).
Die Temperaturen von (9) Motor und (10) Regler werden auf Seite 3 angezeigt, Warnung bei Überschreiten von 70° (Defekt der Neodymmagnete bei 80°) und 60° (willkürlich gewählt).
Seite 4 zeigt (12) Variometer und (13) Höhe und wird normalerweise vor dem Flug auf das Display gebracht. Die Warnschwellen von 5 m/s Steigen/Sinken sowie 150 m (maximal wegen Luftraum) und 50 m (minimal für Baumwipfel und Landeeinteilung) Höhe sind gesetzt, damit entsprechend ein Warnton erzeugt wird. Normalerweise werde ich auf das Modell schauen und nur die akustische Variometeranzeige beachten. Die maximal erreichte Höhe (14) wird nur angezeigt, weil es geht und noch eine Zeile dafür frei ist.
Die Hervorhebung von (12) Vario soll andeuten, daß dieser Wert in der Übertragung Priorität hat, wie in Zeile (1) eingestellt. Er wird dann in jedem M-LINK-Datenpaket, das jeweils zwei Werte enthält, übertragen.
Das war also der Plan vor der praktischen Erprobung. Ob das alles sinnvoll ist, mußte sich durch Erfahrung erst noch herausstellen. Die hat gezeigt, daß man die Werte durchaus anders anordnen könnte. Aber jede Anordnung hat Vor- und Nachteile und so ist es einfach bei den geplanten Einstellungen geblieben.
Ansage
Natürlich mußte ich mir auch noch den Souffleur, das Sprachausgabegerät von Multiplex kaufen und es ist wirklich gut. Es wird nur einmal an den Sender "gebunden", wie ein Empfänger, und beim Fliegen um den Hals gehängt oder in die Hemdtasche gesteckt. Über einen Ohrhörer sagt es die Werte an, die man vorher eingestellt hat. Natürlich ist es genauso "umständlich" wie ich vorher das Funkgerät zum Picolario gefunden habe, aber – wenn es so etwas gibt, dann muß ich es auch haben.
Wie die Sensoren kommt auch der Souffleur mit brauchbarer Voreinstellung. Die wird wiederum nicht jedem gefallen und läßt sich deshalb selbstverständlich ändern. Wenn man (wie ich) die Sensoren anders eingestellt hat, dann muß man sogar den Souffleur entsprechend einstellen. Das kann man für jedes Modell anders machen (wie ich für Brummi, Thermik-Star und Telemaster) und muß dann vor dem Flug am Souffleur das richtige Modell einstellen. Hier ist der Plan für den Thermik-Star:
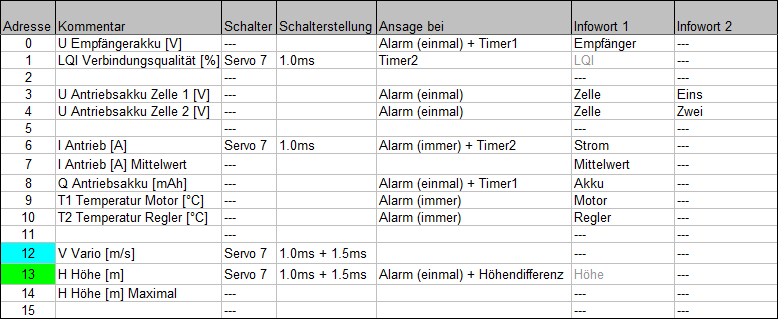
Wie beim Picolario kann man über einen freien Kanal am Sender auf still, knappe Ansage und umfangreiche Ansage umschalten. Das muß nicht so sein, aber ich wollte es wieder so haben und habe es so eingestellt. Die Einträge “Servo 7” in der Spalte “Schalter” zeigen, welche Ansagen ich mit Kanal 7 einschalten kann. In der Spalte “Schalterstellung” ist eingetragen, daß (12) Vario und (13) Höhe in der mittleren Schalterstellung (1.5ms) angesagt werden, diese beiden sowie (1) LQI und (6) Antriebsstrom in der oberen (1.0ms).
(12) Vario ist farblich hervorgehoben, weil keine Sprachausgabe erfolgt, sondern der übliche Varioton veränderlicher Höhe erzeugt wird. Als Eigensinken habe ich die für den Thermik-Star errechneten 0,4 m/s eingetragen (siehe oben). Nun wird der Ton für Sinken erst ausgegeben, wenn das Modell stärker sinkt. Den absoluten Wert von Steigen oder Sinken in m/s kann man immer am Display ablesen.
(13) Höhe ist farblich hervorgehoben, weil sie in bestimmten Schritten angesagt werden kann. Ich habe 5 m Schrittweite eingetragen, um auch bei schwacher Thermik ab und zu einen Höhengewinn angesagt zu bekommen. Das “Alarm (einmal)” in der Spalte “Ansage bei” meint, daß auch bei Über- beziehungsweise Unterschreitung der Warnschwellen (Sensoreinstellungen oben) die Höhe angesagt wird.
Alle anderen Werte können nur in festen zeitlichen Abständen angesagt werden. Wenn der Schalter für Kanal 7 oben steht, werden (1) LQI und (6) Antriebsstrom alle 20 Sekunden angesagt. Diesen Wert habe ich für “Timer2” gewählt. Der (6) Antriebsstrom wird auch bei Überschreiten des im Sensor eingestellten Grenzwertes angesagt, und zwar unabhängig von Kanal 7. Das “Alarm (immer)” bedeutet aber, daß der Wert nicht nur einmal bei Überschreiten des Grenzwertes angesagt wird, sondern solange der Grenzwert überschritten ist. Damit will ich mich aufmerksam machen lassen, wenn etwas nicht in Ordnung ist und ich die Antriebsleistung zurücknehmen sollte.
“Alarm (immer)” ist auch für (9) Temperatur Motor und (10) Temperatur Regler eingestellt. Wenn deren Grenzwerte überschritten werden, muß ebenfalls die Leistung reduziert werden. Diese beiden Werte werden nur in diesem Fall angesagt.
Die (0) Spannung des Empfängerakkus (als Maß für seinen Ladezustand) und die (8) Restladung des Antriebsakkus werden bei Unterschreiten der Warnschwelle einmal angesagt – als Warnung – und regelmäßig alle 3 Minuten (“Timer1”) – zur Überwachung.
Die beiden Zellenspannungen (3) und (4) des Antriebsakkus werden nur bei Unterschreiten der eingestellten Grenzspannung einmal angesagt. Damit lasse ich mich informieren, wenn mindestens eine Zelle schon zu schwach ist, um noch die volle Antriebsleistung abgeben zu können.
Die Werte (7) Antriebsstrom Mittelwert und (14) Höhe maximal werden nicht angesagt.
Um die angesagten Werte unterscheiden zu können, habe ich für alle sogenannte Infowörter ausgewählt. Diese werden jeweils vor dem Wert angesagt, was natürlich seine Zeit braucht. Deshalb muß man sparsam mit den Ansagen sein, damit wenigstens kleine Pausen dazwischen bleiben. Das ist hier erreicht worden.
Der Souffleur ist noch flexibler einstellbar als das Picolario. Dessen Konfiguration hat mir aber so gut gefallen, daß ich sie für den Souffleur im Prinzip übernommen und nur etwas erweitert habe. Vielleicht probiere ich auch einmal die Souffleuse aus, eine Software für das Smartphone.
Flugplatz
Es ist kein richtiger Flugplatz, sondern einfach ein sehr schöner Platz zum Fliegen. Eine eigene Seite zeigt einige Bilder, auch Luftbilder, die mit dem Brummi gemacht wurden, und ein Panorama.

Hier geht es zu meinem früheren Flugplatz.