Der threedee400 von Scorpio

Der threedee400 ist ein Parkflyer für klassischen Kunstflug. Er stammt vom selben tschechischen Hersteller wie Brummi und Super Miss und wurde in Europa von Scorpio®, Ripmax® und in den USA von Hobby Lobby® vertrieben. Empfohlen wurden dazu ein normaler Motor Speed 400 6V (das Modell heißt deshalb threedee400), ein Getriebe MPJet 3:1 (das auch zur Befestigung des Antriebs dient und dem Modell beiliegt), ein Propeller APC 10x7 SF, ein Regler Jeti 14 compact (direkt am Motor) und ein Akku mit 8 Zellen RC-1100-AAU.
Das Modell ist aber schon lange (wohl seit 2006) nicht mehr lieferbar. Es entspricht natürlich auch nicht mehr den heutigen Ansprüchen an Sportmodelle, die wirklich 3D-fähig sein müssen.

Im amerikanischen E-Zone Magazine ist damals ein sehr informativer Artikel über den threedee400 erschienen, der viele nützliche Informationen enthält und das Modell als sehr gutes Sport-Kunstflugmodell kennzeichnet. Um den Namen threedee400 zu rechtfertigen, wäre demnach allerdings wenigstens ein stärkerer Antrieb als der 400er nötig. Wie in dem Artikel 'zwischen den Zeilen' formuliert, genau so ist es: Für das, was man unter 3D versteht, ist das Modell nicht gedacht, man braucht sich nur die Leitwerke und Ruder anzuschauen. Den Namen hat ein Marketing-Fuzzi gewählt. Aber Modelle dieser Konfiguration hat man früher zum Kunstflug-(Basis-)Training benutzt, und dafür ist der 'threedee400' sehr gut geeignet.

Übrigens: Gab es nicht einmal Modelle namens Happy Stick und Little Stick? Jedenfalls gab es Das Ugly Stik von Phil Kraft. Der threedee400 scheint ein elektrisch angetriebener Mutant zu sein. Besonders die Form von Rumpf und Seitenleitwerk, aber auch Flügel- und Höhenleitwerksumriß erinnern an die von Glühzündern angetriebenen früheren Modelle. Ein Aufkleber mit der Kennung 'I-STCK' ('I' wohl für Italien, wo Scorpio sitzt) deutet auch darauf hin. Der tschechische Hersteller hat die Einfachheit des zeitlosen Entwurfs auch für eine einfache Konstruktion genutzt. Das elektrisch angetriebene Modell hat ein Spornfahrwerk, und deshalb sitzt das Höhenleitwerk auf dem Rumpf statt darunter, damit es nicht so leicht beschädigt wird.
Das Modell hat einen geraden Rechteckflügel geringer Streckung (1:4,2) mit dickem Profil und großen Querrudern. Grundriß und runde Profilnase erlauben praktisch keine gerissenen Figuren, nicht einmal normales Trudeln. Dafür ist auch das Seitenleitwerk zu klein und das Seitenruder zu wenig wirksam. Der Rumpf ist ganz einfach kastenförmig und recht dünn. So ist der Widerstand zwar nicht groß, aber auch die seitliche Fläche. Messerflug ist nicht drin, aber dafür fehlt bei der vorgesehenen Motorisierung ohnehin die Leistung.
Das Ganze ist also ein schlüssiges Konzept. Das Modell ist mit dieser Auslegung gut für flüssigen Kunstflug, besonders Figuren mit Rollen, auf engem Raum. Spektakuläre gerissene Figuren sind nicht möglich, aber dafür gibt es auch keine unangenehmen Überraschungen im Flugverhalten. Das ist auch die Quintessenz aus dem oben erwähnten Artikel.
Auf der damaligen Webseite von Hobby Lobby® wurde das Modell (auch mit Bildern und Video!) folgendermaßen angepriesen:
» Readybuilt and covered. Durable balsa and ply structure. 36" wingspan, symmetrical aerobatic airfoil, 300 sq. in. wing area, 29" long, about 25 oz. flying weight, for 4 channels, ailerons (2 servos), elevator, rudder, throttle. MJ 3:1 gearbox included, strong landing gear, great picture assembly instructions. Good aerobatic flight with 700fpm climb, 4.5 minute full power motor run when equipped as we suggest. Since it's rugged you may be tempted to try much stronger power (ours gives about 16 oz. thrust) but you're on your own for that. «
Aufbau
Der threedee400 stammt wohl vom selben tschechischen Hersteller wie der Brummi, auch wenn beim einen 'Scorpio' und beim anderen 'Multiplex' der Lieferant ist. Bei beiden Modellen finde ich die elegant einfache Auslegung und Gestaltung bestechend. Sie ist verbunden mit sehr guten Flugeigenschaften und erstaunlich guten Flugleistungen. Auch die Qualität ist gut, aber hier sind beim threedee400 einige Abstriche zu machen.
Die Leitwerke und der Flügel sind nicht ganz tadellos. Das Höhenruder ist etwas verzogen, aber wenigstens symmetrisch. An einem Querruder ist eine kleine Ecke abgebrochen - na ja. Die Rippen scheinen etwas seitlich versetzt und nicht rechtwinklig zu liegen, als ob die Endleiste gegenüber der Nasenleiste verschoben wäre - auch nicht schlimm. Der Rumpf verdient dagegen wirklich Kritik, weil Formabweichungen bei einem Kunstflugmodell nicht hinnehmbar sind. Daß der Fahrwerksspant etwas nach rechts gedreht ist, könnte sogar Absicht sein. Soll damit das Ausbrechen des Modells beim Startlauf verhindert werden? Keinesfalls kann aber absichtlich der Rumpfquerschnitt nicht rechteckig und die Flügelauflage ungenau geformt sein. Das bringt Probleme mit sich, die man schon beim Bau des Modells beseitigen sollte. Deshalb werden hier noch einige Hinweise zum Bau gegeben.
Pat Mattes berichtet in seinem Artikel im E-Zone Magazine auch über den Bau des Modells und empfiehlt einige Abweichungen von der Reihenfolge der Arbeitsschritte, wie sie in der Anleitung zum Modell angegeben ist. Diese Abweichungen kann ich nur empfehlen und sogar erweitern:
Flügel und Rumpf (mit Leitwerk) sind unabhängig voneinander zu bauen. Bevor man aber etwas an den Rumpf anklebt, sollte man ihn vollständig vorbereiten. Außerdem sollte die Montage in anderer Reihenfolge stattfinden, als in der Anleitung angegeben. Deshalb hier zunächst die Empfehlungen zum Rumpf:
Er ist fertig mit Folie überzogen und wird nicht weiter bearbeitet. Die Öffnungen für Anbauteile müssen nur freigeschnitten werden. Das Loch für Motor und Getriebe im Kopfspant, die Löcher für die Dübel der Flügelgummis, die Auflagefläche des Höhenleitwerks und die Nut für den Sporn aus Sperrholz werden von Folie befreit. Die Nut und/oder der Sporn muß vielleicht noch passend geschliffen werden. Das sollte man jetzt tun, aber den Sporn noch nicht ankleben. Der Ausschnitt für das Fahrwerk an der Rumpfunterseite muß mit einem kräftigen Messer so erweitert werden, daß das Fahrwerk ganz an dem dreieckigen Sperrholzspant im Rumpf anliegt. Die dreieckige Sperrholzzunge sollte jetzt schon so beschliffen werden, daß sie nachher leicht und gut in den Ausschnitt paßt und das Fahrwerk ganz eingeschlossen ist. Die Löcher für die Dübel sind zu eng und müssen aufgebohrt werden, die Kanten der Dübel selbst werden etwas abgerundet.
Dann werden diese eingeklebt, denn man kann sie gleich gut gebrauchen. Das Seitenleitwerk wird zunächst auf das Höhenleitwerk geklebt. Vorher sollte man alle Klebeflächen von Bespannfolie befreien, also die Unterkante des Seitenleitwerks, den entsprechenden Streifen auf dem Höhenleitwerk und an dessen Unterseite die Fläche zum Rumpf. Wenn man die Teile probeweise aneinander hält, kann man anzeichnen und sauber ausschneiden.
Der Bowdenzug für das Höhenruder muß noch vorweg eingeklebt werden. Die beiden Züge für Höhen- und Seitenruder liegen fertig bei und sind klar unterscheidbar. Der Zug wird so in die Nut hinten im Rumpf gelegt, daß das Rohr maximal 15 mm aus dem Rumpfspant vorne herausragt. Am besten ist heften und 'grundieren' mit Sekundenkleber und dann umhüllen mit Epoxi in der Nut hinten im Rumpf.

Das Seitenleitwerk steckt mit einer Zunge im Höhenleitwerk und ist dadurch weitgehend ausgerichtet. Beim Aufkleben muß man nur auf den rechten Winkel zwischen beiden Leitwerken achten. Allerdings soll das Seitenleitwerk in Längsrichtung so liegen, daß die Scharnierkante mit der Hinterkante des Rumpfes fluchtet. Das muß man vorher durch Auflegen der Leitwerke auf den Rumpf ausprobieren.
Jetzt sollte man den Rumpf ganz genau auf seine Form untersuchen. Bei meinem Exemplar ist z.B. der Querschnitt nicht exakt rechteckig (also 'recht eckig'). Wenn man das Leitwerk richtig auf den Rumpf klebt, wird es dann nicht zum Flügel parallel sein. Also ist jetzt die Flügelauflage zu prüfen. Die Form paßt schon nicht ganz zum Profil des Flügels, so daß dieser nur an einigen Punkten aufliegt. Das läßt sich verbessern, wenn man mit einem Rundholz das weiche Balsa an den zu hoch stehenden Stellen etwas eindrückt.
Der Rumpf wird mit seiner geraden Unterseite auf den Tisch gelegt. Der Flügel wird aufgelegt und mit Gummiringen befestigt, das Leitwerk einfach aufgelegt. Die Zunge des Seitenleitwerks wird in einer Nut im Rumpf geführt. Jetzt kann man die Parallelität von Flügel und Leitwerk durch 'Peilen' sehr exakt prüfen. Wahrscheinlich gibt es ein Problem. Man hat die Wahl, entweder das Leitwerk so aufzukleben, daß es parallel zum Flügel liegt (ggf. Auflage am Rumpf entsprechend schleifen), oder an der tieferen Seite der Flügelauflage des Rumpfes etwas aufzulegen (z.B. einen Streifen dicker Pappe). Hat man Parallelität erreicht, klebt man das Leitwerk auf.

Nach der Idee von Pat Mattes sollte der Draht am Sperrholzsporn angebunden werden. Also ein Loch für den 'Haken' bohren und zwei Löcher, durch die dann ein Faden um den Draht gewickelt werden kann. Das macht man dann gleich, gibt Sekundenkleber auf die Wicklungen und an die Auflage des Drahtes und später noch etwas Epoxi darüber. Der komplette Sporn kann so in den Rumpf geklebt werden, daß die Hinterkante des Sperrholzteils mit der Hinterkante des Rumpfes fluchtet. Später wird er noch (z.B. schwarz) lackiert.

Das Fahrwerk besteht aus Draht, der in der Mitte ungefähr im rechten Winkel gebogen ist. Es wird mit etwas Epoxi in den vorher freigeschnittenen Ausschnitt im Rumpf gesteckt und mit der dreieckigen Sperrholzplatte und Epoxi darin festgeklebt. Hält hervorragend und wackelt nicht! Die Sperrholzlasche wird beigeschliffen und zum Schutz gegen Nässe lackiert (hier schwarz).
Bei den Antrieben mit einem MPJet-Getriebe (siehe unten) liegt der Motor unten im Rumpfbug und wird nicht gekühlt, ebenso der Drehzahlsteller. Deshalb habe ich unten in den Rumpf eine Öffnung geschnitten und eine Lufthutze (eigentlich eine Stoßstangendurchführung) angeklebt. Die Entlüftung erfolgt durch die Öffnung hinten im Rumpf (siehe oben).
Die Hutze war auch praktisch, als ich den AXI-Motor eingebaut habe. Die dicken Kabel lassen sich nämlich nicht knicken und direkt hinter dem Motor in den Rumpf führen, obwohl in der Motorbefestigung eine Öffnung dafür wäre. Diese große Befestigung aus GFK muß man übrigens zusätzlich kaufen, damit die Schrauben weit genug außen am Spant liegen. Innen ist die große Öffnung für den 400er Motor. Man braucht auch den Teilesatz für Rückseitenbefestigung des Motors, aber der dort beiliegende Befestigungsstern ist zu klein.
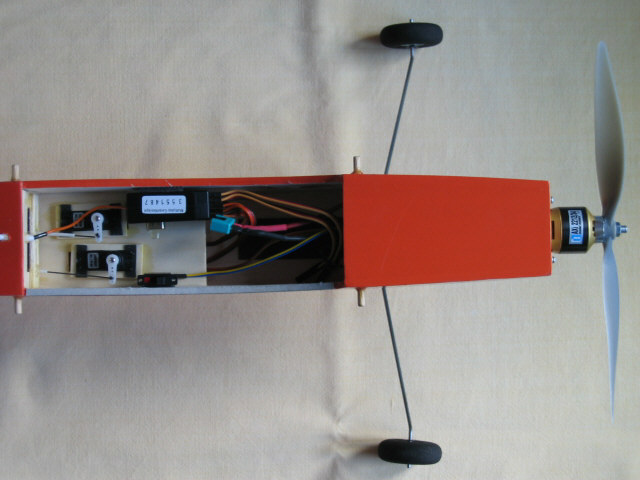
Das Servobrett ist bereits im Rumpf, mit Öffnungen für die Servos. In den vorderen und hinteren Spant sind Schlitze gestanzt, jeweils für die Kabel zum Steller und die Bowdenzüge von Höhen- und Seitenleitwerk. Vor dem Servobrett ist Platz für den Akku, der einfach auf dem Rumpfboden befestigt wird.
Wie man hier sieht, habe ich mich dazu entschieden, das Leitwerk rechtwinklig zum Rumpfboden aufzukleben (siehe oben). Dann mußte die rechte Flügelauflage etwas erhöht werden, wozu hier gerade ein Streifen dicker (grauer) Pappe paßte.
Vielleicht sieht man auch, daß das Fahrwerk gegenüber dem Rumpf nach rechts verdreht ist. Da ich immer Wurfstart mache, weiß ich nicht, ob das Nachteile oder Vorteile hat.
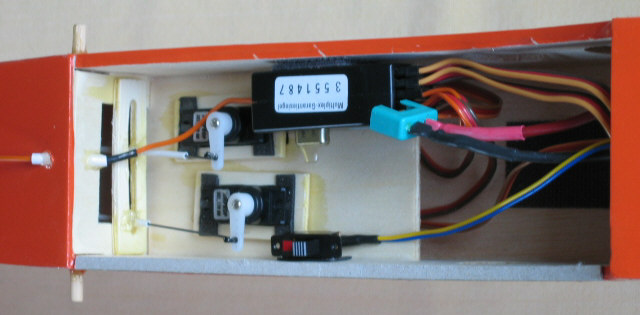
Die Servopositionen sind so vorgesehen und vorgestanzt. Man kann aber frei wählen, welches Servo auf welche Seite kommt und auf welche Seite jeweils der Servoarm kommt. So, wie ich es gemacht habe, kam es mir am 'natürlichsten' vor, aber Pat Mattes beschreibt in seinem Artikel noch eine andere Anordnung als 'natürlich'. Beide sind nicht nach Bauplan, aber wahrscheinlich besser als die dort vorgeschlagene Lösung. Man muß nur vorher alles genau überlegen.
Die Servos werden auf speziellen kleinen Brettchen befestigt. Ich habe starke, aber auch kleine SES-170 BB von Simprop genommen und aufgeklebt. Dazu verwende ich doppelt klebendes Band mit dicker Schaumstoffzwischenlage (die schwarzen Streifen), das hält praktisch genauso fest wie eine Verschraubung und ist einfacher und leichter.
Die Bowdenzüge sind fertig vorbereitet. Man führt sie durch das geschlitzte Brettchen und steckt den abgewinkelten Teil in die passende Bohrung des Servoarms (ausprobieren oder berechnen!). Gesichert werden sie mit ganz dünnem Schrumpfschlauch, denn die mitgelieferten kleinen Kunststoffröhrchen lassen sich nicht sicher ankleben. Außerdem kann man sie schlecht entfernen, wenn man z.B. ein defektes Servo austauschen muß.
Das Ruder wird gerade gestellt, indem das Servobrettchen verschoben wird, und dann wird dieses mit Sekundenkleber befestigt. Das geschlitzte Brettchen wird so am Spant angeklebt, daß die Züge waagerecht zum Servoarm laufen, und die Hüllen der Bowdenzüge werden mit Sekundenkleber und Epoxi (damit es richtig hält) fixiert.
Für die Antenne habe ich eine Durchführung aus Bowdenzughülle angebracht. Sie wird zur Oberkante des Seitenleitwerks geführt und dort an eine Stecknadel geknotet (siehe oben). So hängt zwar noch ein Stück herunter, aber nicht bis zum Boden. Ein Festhängen bei der Landung ist damit ausgeschlossen. Außerdem liegt die Antenne nicht nahe und parallel zu den Bowdenzügen. Mit einem Stück Schrumpfschlauch (schwarz) vor der Durchführung kann sie etwas gespannt werden (Zugentlastung am Empfänger).
Über dem Servobrett hat gerade noch der Empfänger Platz. Es ist der Pico 4/5 von Multiplex, ein guter und robuster Miniempfänger. Ein ganz kleiner und leichter Mikro ist bei diesem Modell nicht nötig. Der Empfänger ist mit Klettband befestigt, so daß man ihn abnehmen und leichter die Servokabel stecken kann. Eine etwas elastische und gedämpfte Befestigung ist damit auch gleich erreicht.
Vorn auf dem Rumpfboden sieht man ein graues Stück Klettband. Die Akkus werden einfach mit einem Gegenstück versehen und aufgedrückt, das reicht für alle praktischen Anforderungen. In das 'Rumpffach' passen der 500er oder ein 1000er NiCd und der Lipo gerade hinein. Die Kabel und Stecker kommen über und neben dem Akku zu liegen.
Der Jeti-Drehzahlsteller hat sogar einen Schalter, der mit Doppelklebeband an einem freien Platz befestigt ist. Zum Abschalten muß man den Flügel abnehmen, aber das ist nicht wichtig.

Am Flügel müssen zuerst die beiden Querruder mit Folienscharnier angebracht werden. Die im Bauplan vorgesehene Methode mit zwei Streifen (weichem) Klebefilm ist sehr zu empfehlen! Man muß darauf achten, daß die Ruder seitenrichtig angebracht werden.
Im Bild sieht man vielleicht, daß die Rippen etwas 'schräg', nicht rechtwinklig zu D-Box und Endleiste sind. Das hat aber offensichtlich keine Auswirkungen auf die Symmetrie des ganzen Flügels und das Flugverhalten.
Oben auf den Endleisten sollen kleine Plättchen aus dünnem Sperrholz aufgeklebt werden, damit die Gummiringe nicht in die Endleiste einschneiden (auf den Bildern ganz oben zu sehen). Am besten bringt man erst die Querruder mit dem Folienscharnier an, weil die Plättchen dabei sehr stören würden. Man braucht nur ein kleines Stück Bespannfolie auszuschneiden, wo dann ein Plättchen mit Epoxi angeklebt wird. Das Scharnier muß nicht angeschnitten werden.
An den Querrudern werden die Ruderhörner angebracht, die rechts und links spiegelbildlich verschieden sind. Der Draht wird in die Messinghülse geklebt (löten ist schwierig) und die Rudergabel aufgeschraubt. Diese tschechischen (MPJet) Gabeln sind sehr gut, weil sie als Achse einen Messingstift haben. Diesen kann man nur lose einstecken, solange man noch die Länge des Gestänges einstellt, und fest einpressen, wenn es paßt.
Durch einfaches Auflegen von Servo und Gestänge ermittelt man die Lage des Servos und schneidet eine passende Öffnung in die Balsabeplankung. Ich habe auch hier das Doppelklebeband mit Schaumstoffzwischenlage verwendet. Es hat hier weitere Vorteile, da Schrauben in der dünnen Beplankung schlecht halten, auch wenn man die Löcher mit Sekundenkleber härtet. Schließlich wird das Gestänge justiert und die Gabelachse eingepreßt.
Die Servokabel müssen im Flügel durch ein Loch in einer Rippe und aus dem Loch in der Beplankung gezogen werden, was aber erstaunlich leicht ist. Am Empfänger habe ich zwei kurze Zwischenkabel gesteckt (siehe oben), damit der Anschluß der Servos auf dem Flugfeld leichter bzw. überhaupt möglich ist. An Buchse und Stecker habe ich je einen roten (links) bzw. grünen (rechts) Wollfaden geknotet. Eine Vertauschung der Anschlüsse wirkt sich zwar nicht auf die Querruderrichtung aus, aber auf vielleicht eingestelltes Differential und auf den Ausschlag der Landeklappen (Flaperon, siehe unten).
Antriebe
Ergänzend zur obenstehenden Einschätzung ist zu sagen, daß der threedee400 im Langsamflug wegen der geringen Flügelstreckung hohen induzierten Widerstand entwickelt. Man muß ihn bei Start, Landung und im Steigflug 'laufen lassen' und braucht bei Kunstflugfiguren mit hohem Auftrieb (z.B. Loops) viel Leistung und Geschwindigkeit. Mit dem Standardantrieb kann man 'normalen' Kunstflug üben, aber mit stärkeren Antrieben läßt sich wesentlich mehr machen (wenn auch nicht '3D', dem Namen des Modells entsprechend), außer Dingen, die wegen der Auslegung (s.o.) nicht gehen. Der oben genannte Artikel im E-Zone Magazine kann hierzu sehr empfohlen werden.
An meinem Exemplar wurde nicht der Standardantrieb verwendet. Ich hatte einen Simprop AcroDrive 350+BB für die Schaumstoff-Suchoi31 von Simprop. Mit dem Werkstoff dieses 'Gummi-Fliegers' konnte ich mich nicht anfreunden und kaufte deshalb den threedee400. Der Antrieb besteht aus einem kugelgelagerten Acro Speed 280BB 6V von Sagami, einem kugelgelagerten Getriebe MPJet 5:1 (das in Form und Abmessungen ungefähr dem mitgelieferten, nicht kugelgelagerten Getriebe entspricht), einem Propeller APC 9x6 SF, einem Regler Graupner PICO MOS 20 und einem Akku 8 Zellen N-500AR. Er liefert ähnliche Leistung wie der Standardantrieb bei geringfügig besserem Wirkungsgrad. Das Modell wiegt damit insgesamt 640 g.

Nachdem es nun 480er-Motoren mit demselben Durchmesser wie 400er gibt, kann man das Modell mit dem mitgelieferten Getriebe MPJet 3:1 verwenden. Mein Exemplar wurde mit dem Multiplex Permax 480 7,2V Motor ausgerüstet. Daran ist gleich ein Drehzahlsteller befestigt, der Akku 8 Zellen N-500AR wird weiter verwendet. Das Modell wiegt nun insgesamt 690 g.
Der Propeller APC 11x7 SlowFly hat kaum Bodenfreiheit, aber mit großem Durchmesser und großer Steigung zieht er gut durch. Der Schub ist höher, auch die erreichbare Geschwindigkeit. Beides tut dem Modell sehr gut, weil die Kunstflugfiguren damit viel besser gelingen. Allerdings muß man auch das recht große Drehmoment des Propellers durch feine Ruderbewegungen ausgleichen, was viel Übung erfordert.

Mittlerweile haben sich moderne Antriebe durchgesetzt, die deutliche Fortschritte in Leistung, Wirkungsgrad und Flugdauer bringen und nicht mehr gar zu teuer sind. Fast schon 'normal' scheint der Antrieb mit einem bürstenlosen Außenläufermotor AXI 2212/34, Drehzahlsteller Jeti Advance 18-3P BEC, LiPo-Akku Kokam 2000H-3s und Propeller APC 11x7 SlowFly. Das wiegt zusammen nur 20 g mehr als der erste Antrieb (AcroDrive 350+BB), hat aber noch mehr Leistung als der zweite Antrieb (480er). Der LiPo-Akku hat die vierfache Kapazität des NiCd der beiden anderen Antriebe (und höhere Spannung) und wiegt nur 10 g mehr. Das Modell wiegt insgesamt 660 g.
Der AXI dreht den gleichen großen Propeller wie der 480er noch etwas kräftiger durch, so daß Kunstflug noch schöner aussieht, aber nur, wenn man auch das noch stärkere Drehmoment ausgleichen kann. Das kann man wiederum viel länger üben, weil die Flugdauer durch den guten Wirkungsgrad des Motors (und Stellers) und die hohe Kapazität des Akkus vervielfacht wird (und weil man nicht dauernd die maximale Leistung braucht). Das ist der eigentliche Vorteil des 'modernen' Antriebs gegenüber dem 'konventionellen' 480er, der zudem 30 g mehr wiegt (4,5% des Modellgewichtes).

Schließlich kann man noch verschiedene Propeller mit dem AXI-Motor probieren. Alle drei Antriebe, die ich für den threedee400 besitze, sind eigentlich überlastet, auch der AXI.
Mit dem 11x7-Propeller fliegt sich das Modell recht dynamisch, aber man darf nur kurzzeitig 'Vollgas' geben, weil sonst der Motor überhitzt (11 A Strom). Andere Propeller schonen den Motor mehr, geben aber ein weniger spektakuläres Flugverhalten.
Der 11x4.7 hat zwar den höchsten Standschub (bei nur 7,5 A Strom), aber der Schub nimmt mit zunehmender Geschwindigkeit schnell ab. Der Kunstflug wirkt etwas 'müde', weil man das Modell nicht 3D-mäßig an den Propeller hängen kann, sondern recht schnell fliegen muß, und das kann man nicht mit diesem Propeller.
Der 10x7 reduziert den Strom im Stand unter den maximal zulässigen Wert von 10 A (auf 9 A) und verschlechtert die Antriebsleistung nur wenig. Diesen Propeller fliege ich gerne an diesem Modell. Angenehm ist ein etwas geringeres Propellermoment.
Der 9x7.5 ist sehr interessant. Damit zieht der Motor nur 7 A Strom im Stand und im Kunstflug, was er auf Dauer verträgt. Er bleibt ganz kühl, während der Akku sich ein wenig erwärmt. Fliegt man gerne dauernd 'Vollgas' (z.B. weil man noch übt und das Gas nicht verändern will), sollte man diesen Propeller wählen. Der Schub reicht bei weitem aus (Schub / Gewicht fast 1:1) und verändert sich nur relativ wenig mit der Geschwindigkeit. Und man hat den angenehmen Nebeneffekt eines geringen Propellermomentes. Eine optimale Konfiguration mit langer Flugdauer (bei 'Vollgas' bis zu 20 min)!
Leider verliert der LiPo-Akku an Kapazität. Zunächst dachte ich, nur
mein Exemplar wäre schlecht oder es wäre einmal zu tief entladen worden.
Nachdem auch mehrere Pflegezyklen mit dem Ladegerät nichts halfen, las ich
dann, daß andere dasselbe Problem haben
(siehe hier
und hier).
Da kann man wohl nichts machen! Die Flugzeit beträgt nur noch 17 min,
aber das ist immer noch viel besser als die 3 bis 5 min mit den alten
Antrieben.
[Nachträglicher Kommentar: Damals (2004) waren die LiPos noch neu und die Gebrauchsanweisungen aus heutiger Sicht falsch. Es wurde empfohlen, die Akkus voll geladen zu lagern. Das war fast ein Werbeargument, denn man war - anders als mit den NiCds - stets bereit zum Fliegen. Entladen hat man im Fluge, bis der Regler das Zeichen zum Landen gab. Selbst wenn man die höchste Abschaltspannung wählte, war der Akku schon recht tief entladen. Und weder Balancer noch Anschlüsse dafür am Akku gab es. Das könnten damals die Gründe für den "frühen LiPo-Tod" gewesen sein.]
Im amerikanischen E-Zone Magazine sind nach dem Artikel über den threedee400 vom selben Autor zwei weitere Artikel erschienen, in denen bürstenlose Außenläufermotoren und Tests mit dem threedee400 beschrieben werden. Im ersten Artikel geht es (neben dem kleinen Nippy 280) um den Nippy 400, der schon 15 A zieht, und im zweiten Artikel um den richtig 'heißen' PJS 1000. Es scheint sich um die Motoren zu handeln, die hier von Scorpio® als µ-tron R280, R400 oder ähnlich bezeichnet und vertrieben wurden. Die Artikel sind vielleicht zum Vergleich interessant.
Einstellungen
Wie beim Brummi war auch beim threedee400 die Schwerpunktangabe im Bauplan falsch, bei beiden Modellen um 20 mm. Angegeben waren jeweils 60 bzw. 65 mm, richtig sind aber 80 bzw. 84 mm. Beim threedee400 wären 50 g Blei vorne am Getriebe nötig gewesen, das konnte nicht sein. Durch Berechnen und Ausprobieren im Simulator fand ich dann heraus, daß beim Einbau der Komponenten an der jeweils vorgesehenen Stelle der Schwerpunkt auch ohne Blei schon sehr gut zu liegen kommt. Es muß sich um einen systematischen Fehler beim tschechischen Hersteller handeln, oder er will seine Kunden auf die Probe stellen. Die haben wir dann wohl bestanden.
Die Ruderausschläge sind nicht ganz nach Bauplan eingestellt. Höhen- und Seitenruder haben zwar 30° wie empfohlen (viel mehr geht auch nicht), die Querruder aber 30° statt 20°. Sie sind dann bei kleiner Geschwindigkeit richtig wirksam, allerdings bei hoher Geschwindigkeit auch 'giftig'. Mit dem Höhenruder kann man das Modell zu stark ziehen, so daß es z.B. im Loop seitlich ausbricht und einen 'Korkenzieher' fliegt. Für normalen Flug habe ich mir den Schalter für Dual Rate so eingestellt, daß auf Quer- und Höhenruder nur 2/3 (67%) Ausschlag, auf dem Seitenruder voller Ausschlag (100%) von jeweils 30° ausgegeben werden. Die vollen Ausschläge braucht man mit dem starken Antrieb nur bei extremen Figuren im Kunstflug und allgemein bei der Landung.
Die Querruder sind nicht differenziert. Bei zügiger Geschwindigkeit entsteht praktisch kein negatives Rollwendemoment, bei geringer Fahrt kaum. Zum Kurven ist also nicht unbedingt Seitenruder erforderlich, kann aber auch bei diesem Modell nicht schaden. Bei einem Computersender wie dem Cockpit MM mischt man dem Querruder Seitenruder zu. Am besten scheint mir hier 50% Seitenruder (Cockpit MM: 'COMBI QR -25%'). Der Mischer läßt sich auch abschalten, aber das ist noch nicht einmal unbedingt nötig, weil das Seitenleitwerk/-ruder recht klein ist und selbst Rollen nicht allzu unsauber werden.
Nach Rollen und Turns scheint das Modell 'mit dem Schwanz zu wedeln'. Mit einem Piezo-Kreisel für das Seitenruder kann man die Dämpfung vergrößern und das Wackeln beseitigen. Den Kreisel habe ich aber nicht mehr im Modell, weil er eine 'Macke' hat und auch nicht wirklich gebraucht wird.
Übrigens sind die Querruder auch als Landeklappen eingestellt (Flaperon), aber nur maximal 10° Ausschlag. Das macht aus dem symmetrischen Profil ein besser tragendes, ohne bei Querruderausschlägen einen Strömungsabriß hervorzurufen. Das Modell wird zur Landung ruhiger und gutmütiger, und man kann es mit Klappenausschlag vorläufig trimmen, wenn der Schwerpunkt noch nicht stimmt. Deshalb habe ich auch den Flaperon-Mischer verwendet und nicht Spoileron. Flaperon läßt auch Ausschläge nach oben zu, also eine 'Trimmung' in beide Richtungen. Snap Flap wäre natürlich mit dem Modell auch möglich und sinnvoll, geht aber nicht mit meinem Cockpit MM.
Möglich und nützlich sind aber ganz einfache Mischer. Mit dem leichten AXI-Motor liegt der Schwerpunkt des threedee400 jetzt recht weit hinten. Das Modell ist nicht instabil und reagiert sogar angenehm direkt auf Höhenruder. Aber es liegt nicht mehr neutral, sondern nimmt immer etwas die Nase hoch. Dagegen helfen die Höhenruder-Mischer im Cockpit MM. Mit dem 'Gas' (Motorleistung) wird 4% Tiefenruder gegeben, mit den Landeklappen (Flaperon) -5% Höhenruder, so daß der angetriebene Flug waagerecht ist und der Gleitflug eine angemessene Geschwindigkeit hat. Das funktioniert sogar im Rückenflug recht gut.
Fazit
im Telegrammstil:
- typisches Stick-Modell
- raffiniert einfach konstruiert
- vertretbarer Bauaufwand (auch in Euro)
- Bauausführung solide, Qualität noch gut
- Flugeigenschaften sehr gut und gutmütig
- für langes Basis-Kunstflugtraining (klassisch, kein 3D)
- aber nur mit Bürstenlos/LiPo-Motorisierung
- sehr handlich, aber nicht zu klein und leicht
- recht robust, auch bei Wind und Landung
Dieses Modell ist - wie alle Stick-Modelle - ein ausgezeichneter Basistrainer für klassischen (Präzisions-) Kunstflug. Als solcher ist es mit dem AXI 2212/34 Motor, APC 9x7.5 SlowFly Propeller und 2000-3s LiPo Akku perfekt konfiguriert. Diese Variante sollte man für lange, effektive Trainingsflüge bevorzugen. Und noch ein Vorschlag: Zuerst einmal versuchen, eine Akkuladung nur mit Starts und Landungen ganz auszufliegen, ohne das Modell zu beschädigen! ;-)
Nachtrag 1
Der threedee400 fliegt noch - oder wieder! Der LiPo-Akku von 2004 ist natürlich schwach geworden, auch wenn er noch funktioniert. Im Herbst 2014 wurden meine Modelle auf 2,4GHz-Fernsteuerung umgestellt und da erhielt der threedee nicht nur einen neuen Empfänger, sondern auch einen neuen LiPo-Akku - nach 10 Jahren.
 Ein Empfänger mit 5 Kanälen genügt hier und auch
einer mit nur einem Empfangsteil und einer Antenne. Sensoren für
Telemetrie sind nicht nötig, so daß der "RX-5 light"
von Multiplex gerade richtig ist. Er ist kleiner als der alte Pico 4/5
und bringt das Bündel Servokabel mit den Steckern ein wenig
weiter nach hinten. Die Antenne paßt zufällig genau in der
Länge. Daß sie nicht senkrecht aus dem Rumpf ragt, sondern
geneigt, tut dem guten Empfang keinen Abbruch. Der Empfänger
meldet sogar Signalstärke und Spannung an den Sender.
Ein Empfänger mit 5 Kanälen genügt hier und auch
einer mit nur einem Empfangsteil und einer Antenne. Sensoren für
Telemetrie sind nicht nötig, so daß der "RX-5 light"
von Multiplex gerade richtig ist. Er ist kleiner als der alte Pico 4/5
und bringt das Bündel Servokabel mit den Steckern ein wenig
weiter nach hinten. Die Antenne paßt zufällig genau in der
Länge. Daß sie nicht senkrecht aus dem Rumpf ragt, sondern
geneigt, tut dem guten Empfang keinen Abbruch. Der Empfänger
meldet sogar Signalstärke und Spannung an den Sender.
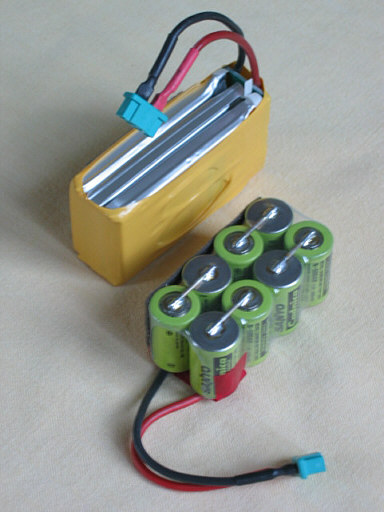
Der Akku paßt gut in den dafür vorgesehenen Raum. Nur die Anschlußkabel sind arg dick und steif und können gerade eben nach vorn gebogen werden, um die Verbindung zum Regler zu stecken. Gegenüber den früheren Platzverhältnissen mit dem alten Kokam-Akku ist das aber eine Verbesserung.
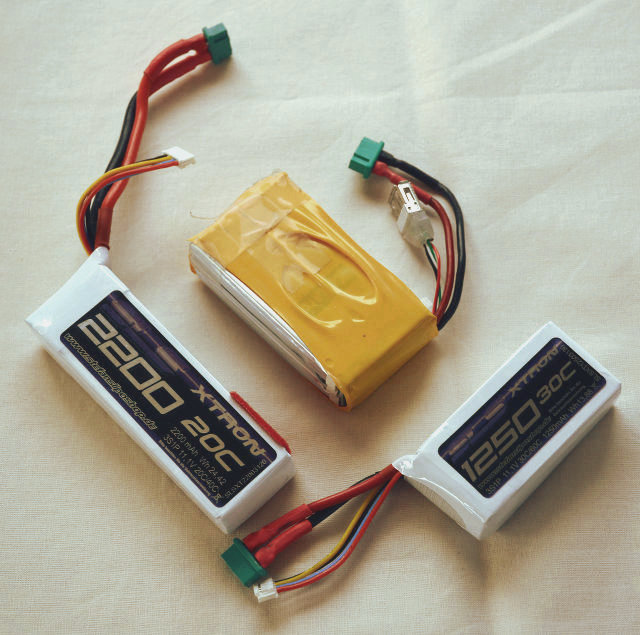 Dieser alte LiPo (gelb, übrigens hier mit nachgerüstetem
Balancer-Anschluß) hatte einmal 2000 mAh Kapazität und
paßte gerade in den Rumpf. Ein moderner LiPo mit 2200 mAh
ist dünner, aber länger und paßt nicht. Deshalb habe
ich einen gut passenden kleinen LiPo gewählt, der 37,5 A
Strom verträgt. Das wird nicht gebraucht, aber es dürfte
auch geringen Innenwiderstand und damit hohen Wirkungsgrad bedeuten.
Die 1250 mAh Kapazität sind sogar mehr als der alte
Kokam jetzt noch hergibt und gut für 12½ Minuten
"Vollgas"-Flugzeit.
Dieser alte LiPo (gelb, übrigens hier mit nachgerüstetem
Balancer-Anschluß) hatte einmal 2000 mAh Kapazität und
paßte gerade in den Rumpf. Ein moderner LiPo mit 2200 mAh
ist dünner, aber länger und paßt nicht. Deshalb habe
ich einen gut passenden kleinen LiPo gewählt, der 37,5 A
Strom verträgt. Das wird nicht gebraucht, aber es dürfte
auch geringen Innenwiderstand und damit hohen Wirkungsgrad bedeuten.
Die 1250 mAh Kapazität sind sogar mehr als der alte
Kokam jetzt noch hergibt und gut für 12½ Minuten
"Vollgas"-Flugzeit.
Der alte Akku wiegt 170 g, der neue kleine nur 118 g. Der alte Empfänger wiegt 18 g, der neue nur 7 g. Das ist eine Ersparnis von 63 g und das Modell wiegt jetzt nur noch ungefähr 585 g. Diese 11% weniger Flächenbelastung empfindet man schon als angenehm im Kunstflug, und auch der Schwerpunkt liegt jetzt wieder da, wo er sein sollte, bei 84 mm.
Die oben unter "Einstellungen" erwähnten Werte für Ruderausschläge und Mischer sind natürlich in meinem aktuellen Sender Multiplex ROYALpro9 genauso eingestellt wie vorher im Cockpit MM. Jetzt kann ich aber auch noch Snap Flap zuschalten (Querruder gegenläufig zum Höhenruder). Angenehm sind auch verschiedene Flugphasen (flight modes), zum Beispiel extremer Kunstflug mit Snap Flap und großen Ruderausschlägen, normaler ohne Snap Flap und mit kleinen Ruderausschlägen, sowie Landung mit Flaperons, Combi und passender Trimmung, ganz leicht mit einem Schalter umschaltbar.
Nachtrag 2
2015 hatte der threedee400 nur wenige Flüge mit dem neuen Akku gemacht. Im Frühjahr 2016 wurde er aus dem Winterschlaf geholt und alle Funktionen wurden getestet. Dabei fielen beide Flügelservos aus, das eine tat einfach nichts mehr und das andere blockierte in einer 80°-Position (statt nur 45°), vielleicht ein gebrochenes Zahnrad. Jetzt mussten digitale Servos her.
 Die HS-5055MG haben zwar kein Kugellager und weniger Kraft als die alten Servos,
aber sie sind wesentlich billiger als die besseren HS-5065MG. Das kleinere Moment
merkt man dem Modell nicht an, aber die bessere Stellgenauigkeit! Vorher kehrten
die Ruder nie genau in Neutralstellung zurück und kleine Ausschläge und
viel Expo waren praktisch nicht möglich.
Die HS-5055MG haben zwar kein Kugellager und weniger Kraft als die alten Servos,
aber sie sind wesentlich billiger als die besseren HS-5065MG. Das kleinere Moment
merkt man dem Modell nicht an, aber die bessere Stellgenauigkeit! Vorher kehrten
die Ruder nie genau in Neutralstellung zurück und kleine Ausschläge und
viel Expo waren praktisch nicht möglich.
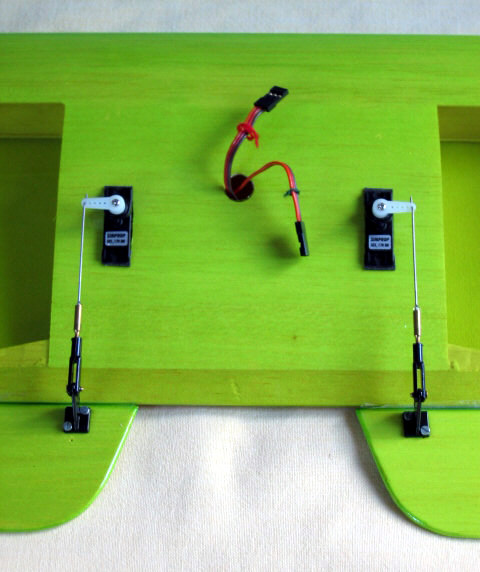
Jetzt fiel auf, daß Rollen doch nicht ganz axial waren und vielleicht doch etwas Differenzial an den Querrudern angebracht wäre. 10% bis 15% lassen Rollen deutlich besser aussehen. Die Servohebel stehen in Neutralstellung nicht ganz rechtwinklig, weil die Gestängelänge nicht angepasst wurde. Damit wird vielleicht ausgeglichen, daß die Querruder nicht mittig, sondern oben angeschlagen sind (im Bild unten). Vorher war möglicherweise etwas Differential vorhanden, jetzt gibt es aber das im Sender gezielt eingestellte.
 Auch der Längstrimm war verbesserungswürdig. Die Schwerpunktlage bei
84 mm wirkte mit dem leichteren neuen Akku zwar noch neutral, aber doch
deutlich unruhiger als vorher. Weil das Modell jetzt nur noch 585 g wog,
fielen zwei Trimmgewichte von je 10 g "nicht ins Gewicht". Die
neue Schwerpunktlage bei 78 mm läßt das Modell ruhiger, aber
immer noch neutral (aufrecht und auf dem Rücken ohne
Höhenruderausschlag) fliegen, wenn mit den Querrudern etwas Wölbung
eingestellt ist.
Auch der Längstrimm war verbesserungswürdig. Die Schwerpunktlage bei
84 mm wirkte mit dem leichteren neuen Akku zwar noch neutral, aber doch
deutlich unruhiger als vorher. Weil das Modell jetzt nur noch 585 g wog,
fielen zwei Trimmgewichte von je 10 g "nicht ins Gewicht". Die
neue Schwerpunktlage bei 78 mm läßt das Modell ruhiger, aber
immer noch neutral (aufrecht und auf dem Rücken ohne
Höhenruderausschlag) fliegen, wenn mit den Querrudern etwas Wölbung
eingestellt ist.
Erst jetzt fiel noch auf, daß beide Höhenruderhälften verzogen (verdreht) waren, vielleicht während der Lagerung des Modells. In der Mitte, am Rumpf, war der Einstellwinkel noch derselbe wie der des Flügels, zu den Spitzen hin verringerte sich der Einstellwinkel. Mit dem Folienbügeleisen konnte das Leitwerk einigermaßen gerichtet werden, der bleibende Rest von Verdrehung muß mit etwas Tiefenruder-Trimmung ausgeglichen werden.
Nachtrag 3
Jetzt (2016) ist mein threedee400 14 Jahre alt und nun ist offenbar "der Wurm drin". Ausgerechnet als ich das Modell vorführen wollte "landete" der threedee in einem Kornfeld. Dort war das Höhenruderservo ausgefallen und es hatte sich auch ein Querruder komplett abgelöst, das heißt das Scharnier aus Klebefilm war auf ganzer Länge abgerissen. Keine Ahnung, ob eines davon die Absturzursache war, aber in jedem Fall peinlich...
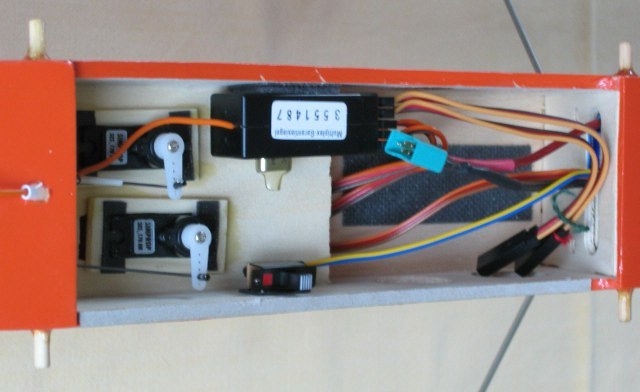
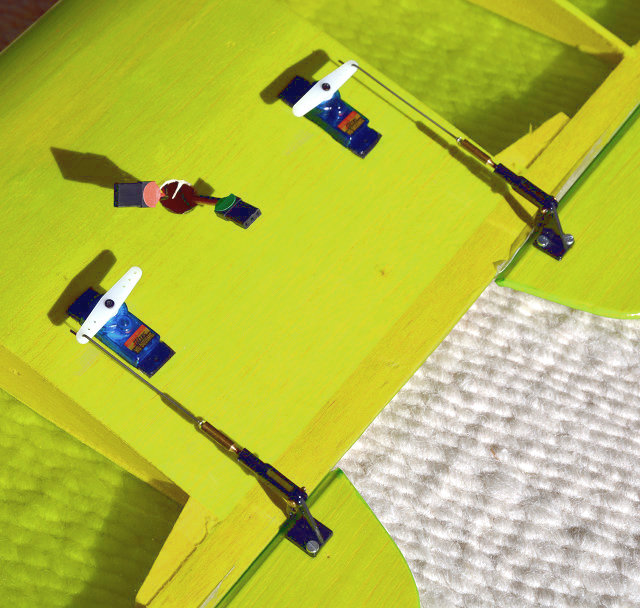
 Nun also auch neue Rumpfservos. Hatte ich gleich mit den Flügelservos
machen wollen, aber der Laden hatte nur zwei vorrätig und dann war es
"vergessen". Die HS-5055MG passen stramm, schrauben war bei dem
Sperrholz einfacher als kleben. (Die hellen Stellen zeigen, wo die alten
Klebestreifen waren.) Die Ruderanlenkungen passen nach wie vor.
Übrigens, der Servohebel schleift nicht an der Antenne.
Nun also auch neue Rumpfservos. Hatte ich gleich mit den Flügelservos
machen wollen, aber der Laden hatte nur zwei vorrätig und dann war es
"vergessen". Die HS-5055MG passen stramm, schrauben war bei dem
Sperrholz einfacher als kleben. (Die hellen Stellen zeigen, wo die alten
Klebestreifen waren.) Die Ruderanlenkungen passen nach wie vor.
Übrigens, der Servohebel schleift nicht an der Antenne.
 Hier noch einmal die neuen Flügelservos, aber man beachte die neuen
Querruderscharniere. Man sieht sie nicht (nur die Bespannfolie), aber sie
sind da. Im Bild weiter oben sieht man den alten Klebefilm, schon halb
abgelöst, und dann war er nicht mehr da. Es war nur gewöhnlicher
Klebefilm (die Marke tut nichts zur Sache) und nach 14 Jahren war er eben
mürbe und hielt nicht mehr. Die Anzeichen hatte ich geflissentlich
übersehen. Jetzt ist richtiges (teures) Folienscharnier angebracht,
das besser geeignet (weicher) ist und erfahrungsgemäß (noch)
länger hält.
Hier noch einmal die neuen Flügelservos, aber man beachte die neuen
Querruderscharniere. Man sieht sie nicht (nur die Bespannfolie), aber sie
sind da. Im Bild weiter oben sieht man den alten Klebefilm, schon halb
abgelöst, und dann war er nicht mehr da. Es war nur gewöhnlicher
Klebefilm (die Marke tut nichts zur Sache) und nach 14 Jahren war er eben
mürbe und hielt nicht mehr. Die Anzeichen hatte ich geflissentlich
übersehen. Jetzt ist richtiges (teures) Folienscharnier angebracht,
das besser geeignet (weicher) ist und erfahrungsgemäß (noch)
länger hält.
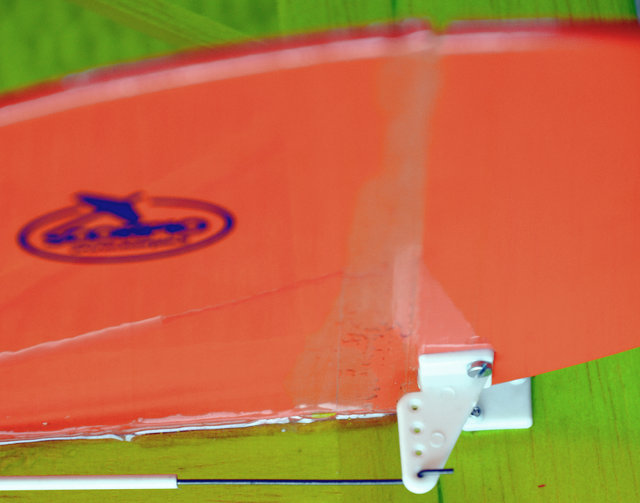 Höhen- und Seitenruder waren nämlich "ab Werk" (einseitig)
mit Folienscharnier angeschlagen und sind nach wie vor in Ordnung. Probleme
macht aber die hellrote Bespannung von Rumpf und Seitenleitwerk. Es sind
offenbar zwei Folienschichten mit einer Farbschicht dazwischen, und die
löst sich ab. (Die durchsichtige grün-gelbe Folie ist völlig
in Ordnung.) Das Seitenruderscharnier ist besonders unten schon recht weit
abgelöst, das heißt eigentlich die Folie darunter. Als
erhaltende Maßnahme wurde zusätzlich Scharnierfolie auch auf
die andere Seite aufgebracht, wie es ohnehin bei den Querrudern ist.
Höhen- und Seitenruder waren nämlich "ab Werk" (einseitig)
mit Folienscharnier angeschlagen und sind nach wie vor in Ordnung. Probleme
macht aber die hellrote Bespannung von Rumpf und Seitenleitwerk. Es sind
offenbar zwei Folienschichten mit einer Farbschicht dazwischen, und die
löst sich ab. (Die durchsichtige grün-gelbe Folie ist völlig
in Ordnung.) Das Seitenruderscharnier ist besonders unten schon recht weit
abgelöst, das heißt eigentlich die Folie darunter. Als
erhaltende Maßnahme wurde zusätzlich Scharnierfolie auch auf
die andere Seite aufgebracht, wie es ohnehin bei den Querrudern ist.
 Eigentlich müssten Rumpf und Seitenleitwerk neu bespannt werden,
aber das ist eine Arbeit für den Winter. Deshalb wurden vorläufig
noch die Rumpfkanten mit Klebefilm umklebt, um die sich dort ablösende
Folie zu sichern. Hoffentlich "vergesse" ich die Sache im
kommenden Winter nicht.
Eigentlich müssten Rumpf und Seitenleitwerk neu bespannt werden,
aber das ist eine Arbeit für den Winter. Deshalb wurden vorläufig
noch die Rumpfkanten mit Klebefilm umklebt, um die sich dort ablösende
Folie zu sichern. Hoffentlich "vergesse" ich die Sache im
kommenden Winter nicht.
Nachtrag 4
Absturz! Nach den unerklärlichen Problemen habe ich den threedee400 jetzt (2018) doch wieder einmal ausprobieren wollen und nun war nicht nur "der Wurm drin". Er flog nicht stabil, sondern wollte entweder sinken oder steigen, und brauchte ständig Korrekturen mit dem Höhenruder. Schließlich wollte ich ihn aus einem flachen Sturzflug abfangen, worauf er noch steiler wurde und fast senkrecht auf die Landebahn stürzte.
Als ich das Modell 2016 einmal vorführen wollte, war es in einem Kornfeld "gelandet" (Nachtrag 3). Damals war das Höhenruderservo ausgefallen, aber ich wußte nicht, ob das die Absturzursache war. Nach dem Wurfstart war das Modell nicht gestiegen, sondern ging nach unten ins Korn. 2017 hatte ich wieder Probleme, die ich aber auf zu weit hinten liegenden Schwerpunkt zurückführte. Gleich nach dem Wurfstart ging das Modell wieder nach unten "auf die Nase" und diesmal zerbrach der Propeller.
Gemeinsam ist diesen drei Vorfällen, daß ich leicht am Höhenruder gezogen habe, das Modell aber nach unten strebte. Eine Umkehrung der Ruderwirkung konnte ich mir nicht vorstellen, solange ich das Problem in der Fernsteuerung suchte. Also musste ich doch irgendetwas falsch gemacht haben. Erst nach dem dritten Absturz kam eine Idee: Kann es nicht das verzogene Höhenleitwerk gewesen sein?
Weiter oben, am Ende von Nachtrag 2, habe ich erwähnt, daß ich das verzogene Höhenleitwerk gerichtet habe. Gleich darunter, am Anfang von Nachtrag 3, steht dann, daß "der Wurm drin" ist – aber kein Zusammenhang. Den sehe ich jetzt endlich, auch wenn es keinen Beweis gibt. Es gibt einfach nur diese Erklärung, denn ich bin ganz sicher, daß ich in allen drei Fällen am Höhenruder gezogen habe, und das Servo lief auch richtig.
In Nachtrag 2 steht, daß ein Restverzug mit etwas Tiefenrudertrimmung ausgeglichen wird. Das Höhenruder (Vollbalsa) ist auch verzogen, es bildet sozusagen einen Bogen, seine beiden Enden stehen höher als sie sollten. Bei kleinem Ausschlag nach oben schnappen die beiden Enden nach unten und drücken die Dämpfungsfläche des Leitwerks etwas nach unten. Das Höhenruder wirkt wie ein Servoruder auf die Leitwerksflosse. Wohl wegen der großen Fläche genügt ihr offenbar eine kleine Verdrehung, um als Tiefenruder zu wirken.
 Hier sieht man nur, wie das Höhenruder verzogen ist; es steht
an beiden Enden über der Ebene der Dämpfungsfläche.
Wird es weiter nach oben ausgeschlagen, drückt die
überstehende schräge Vorderkante den hinteren Holm
der Leitwerksflosse nach unten.
Hier sieht man nur, wie das Höhenruder verzogen ist; es steht
an beiden Enden über der Ebene der Dämpfungsfläche.
Wird es weiter nach oben ausgeschlagen, drückt die
überstehende schräge Vorderkante den hinteren Holm
der Leitwerksflosse nach unten.
Vielleicht hätte ich das Leitwerk nicht richten sollen. Vorher war der Verzug so stark, daß die Wirkung eindeutig nach unten war. Es gab praktisch eine Einstellwinkeldifferenz und deshalb stabilen Flug. Ich wollte neutrales Verhalten (besser für Kunstflug), aber es entstand das Gegenteil von stabil, entweder etwas über oder unter neutral – labil oder einfach "kippelig".
Ein Bild vom zerstörten Rumpfbug zeige ich nicht, das sähe zu traurig aus. Der Motorspant ist herausgebrochen und dahinter ist einiges gesplittert. Es wäre nicht allzu schwer, das zu reparieren, aber ich warte eine Weile. Vielleicht ist mir das Modell dann wieder wert, repariert zu werden. Vor allem: Vielleicht kommt mir eine Idee, wie das Problem mit dem Höhenleitwerk zu lösen ist.
Nachtrag 5
Nach mehr als einem Jahr war klar: ich will nicht mehr. So schön das Modell auch war, richtig gut wird es nicht mehr. Irgendwie kam ich im Herbst 2019 auf die Idee, daß ein Doppeldecker interessant wäre. Den Gemini von Multiplex nämlich gab es in meinem Verein, nur leider gab es ihn nicht mehr neu von Multiplex. Jemand hatte aber noch einen Baukasten samt Antriebssatz "gehortet" und bot ihn recht günstig an. Empfänger und Servos vom threedee400, Akku vom Brummi – fertig war ein Kunstflieger für nur 150 €, seit 2020 häufig in der Luft. Das hat den sieben Jahre alten Akku überfordert, weshalb doch ein neuer, etwas größerer (2400 mAh) angeschafft wurde (+37 €).
 Der Gemini ist gewissermaßen ein Gegensatz zum
threedee400: gleiche Spannweite (0,92 m)
aber eben ein Doppeldecker (34 dm² statt 19 dm²
Fläche), 880 g schwer (statt 600 g), Flächenbelastung
26 g/dm² (statt 32 g/dm²), aus Schaumstoff
in eleganter und strömungsgünstiger Form, mit relativ
zum Gewicht schwächerem Motor, etwas gewölbtem (asymmetrischem)
Flügelprofil und großen Leitwerken
und Rudern.
Der Gemini ist gewissermaßen ein Gegensatz zum
threedee400: gleiche Spannweite (0,92 m)
aber eben ein Doppeldecker (34 dm² statt 19 dm²
Fläche), 880 g schwer (statt 600 g), Flächenbelastung
26 g/dm² (statt 32 g/dm²), aus Schaumstoff
in eleganter und strömungsgünstiger Form, mit relativ
zum Gewicht schwächerem Motor, etwas gewölbtem (asymmetrischem)
Flügelprofil und großen Leitwerken
und Rudern.
Kunstflug ist damit nicht so dynamisch, Rückenflug sogar schwierig, und für einige Figuren muß man Schwung holen. Mit den großen Rudern und einem stärkeren Antrieb wäre aber sogar etwas 3D möglich. Das Modell gleitet gut und schwebt lange aus.
Der Gemini kam 2006 heraus, der Antrieb schon LiPo und bürstenlos, der Werkstoff schon Schaum. Er ist kein reiner Parkflyer mehr aber auch noch kein richtiges 3D-Modell. 2.4GHz-Empfänger und digitale Servos kamen noch später und sind für den Gemini mit seinen großen Rudern noch mehr eine Verbesserung als für den threedee400. Schön daß sie jetzt so gut verwendet sind.
Nachtrag 6
Nun lag noch der Antrieb des threedee400 ungenutzt herum. Im Herbst 2020 fühlte ich den Bedarf für einen Nurflügler, um an einem Vereinswettbewerb teilnehmen zu können. Im Frühjahr 2021 wurde die Idee in die Tat umgesetzt: Der Xeno von Multiplex wurde gewählt, weil es dafür einen 9x6 Faltpropeller gibt und der hier ganz gut passt. Das Modell selbst ist nicht teuer, AXI-Motor und Jeti-Regler sowie Akku kommen vom threedee400, dazu aber noch der neue Propeller sowie vor allem Empfänger und zwei Servos (beides wie im threedee400 beziehungsweise jetzt im Gemini) – macht zusammen doch schon 200 €.
 Der Xeno ist recht anders als der threedee400:
mehr Spannweite (1,25 m statt 0,92 m), mehr Fläche
(31 dm² statt 19 dm²), schwerer (740 g statt 600 g),
geringere Flächenbelastung (24 g/dm² statt 32 g/dm²),
aus Schaumstoff in eleganter und strömungsgünstiger
Form, Nurflügler, Flügelprofil mit S-Schlag, große
Ruder, mit dem höheren Gewicht und anderen Propeller nun
schwächer motorisiert.
Der Xeno ist recht anders als der threedee400:
mehr Spannweite (1,25 m statt 0,92 m), mehr Fläche
(31 dm² statt 19 dm²), schwerer (740 g statt 600 g),
geringere Flächenbelastung (24 g/dm² statt 32 g/dm²),
aus Schaumstoff in eleganter und strömungsgünstiger
Form, Nurflügler, Flügelprofil mit S-Schlag, große
Ruder, mit dem höheren Gewicht und anderen Propeller nun
schwächer motorisiert.
Der Xeno kam 2009 heraus, der Antrieb LiPo und bürstenlos sowie der Werkstoff Schaum mit Kunststoff-Spritzgussteilen waren schon selbstverständlich. Er ist kein Parkflyer und natürlich kein 3D-Modell, sondern für schnelles Gleiten am Hang und einfachen Kunstflug gedacht. 2.4GHz-Empfänger und digitale Servos kamen von Multiplex erst im selben Jahr, sind aber gerade für den Xeno als Nurflügler mit großen Rudern sehr nützlich.
Der Motor sitzt ungefähr im Schwerpunkt (wo die Belüftungsöffnung in der Haube ist) und treibt den Propeller über eine Fernwelle (aus Stahlrohr) an. Davor sitzt der Regler, dessen Bremse nun eingeschaltet wurde und der immer noch gut geeignet ist (er war damals – 2004 – fortschrittlich). Der Akku ist mittlerweile fast sieben Jahre alt aber immer noch recht munter. Wäre doch schade gewesen um die drei Teile; jetzt sind sie wieder nützlich.
Weiteres
Um zunächst im Simulator üben zu können, habe ich den threedee400 im Modellflugsimulator REFLEX abgebildet. Die späteren Änderungen wurden an den Simulatormodellen nachvollzogen. Wer den REFLEX besitzt, kann alle Antriebsvarianten ausprobieren oder Kunstflug damit üben. Es gibt hier eine eigene Seite mit noch mehr Informationen über die Antriebe. Dort sind auch die Modelldateien für den REFLEX zum herunterladen zu finden.